Torqeedo
Victron <-> Torqeedo 48-5000

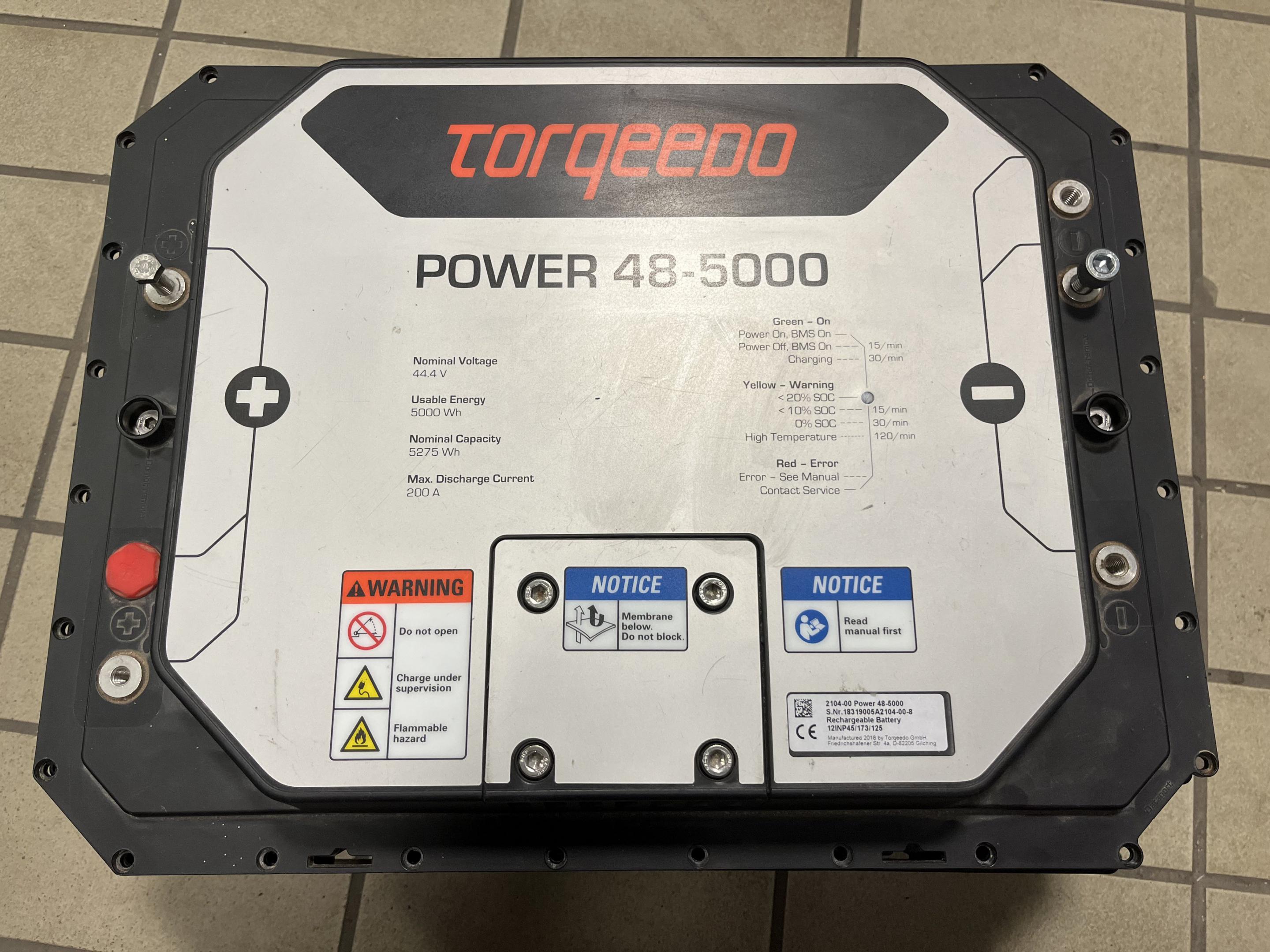
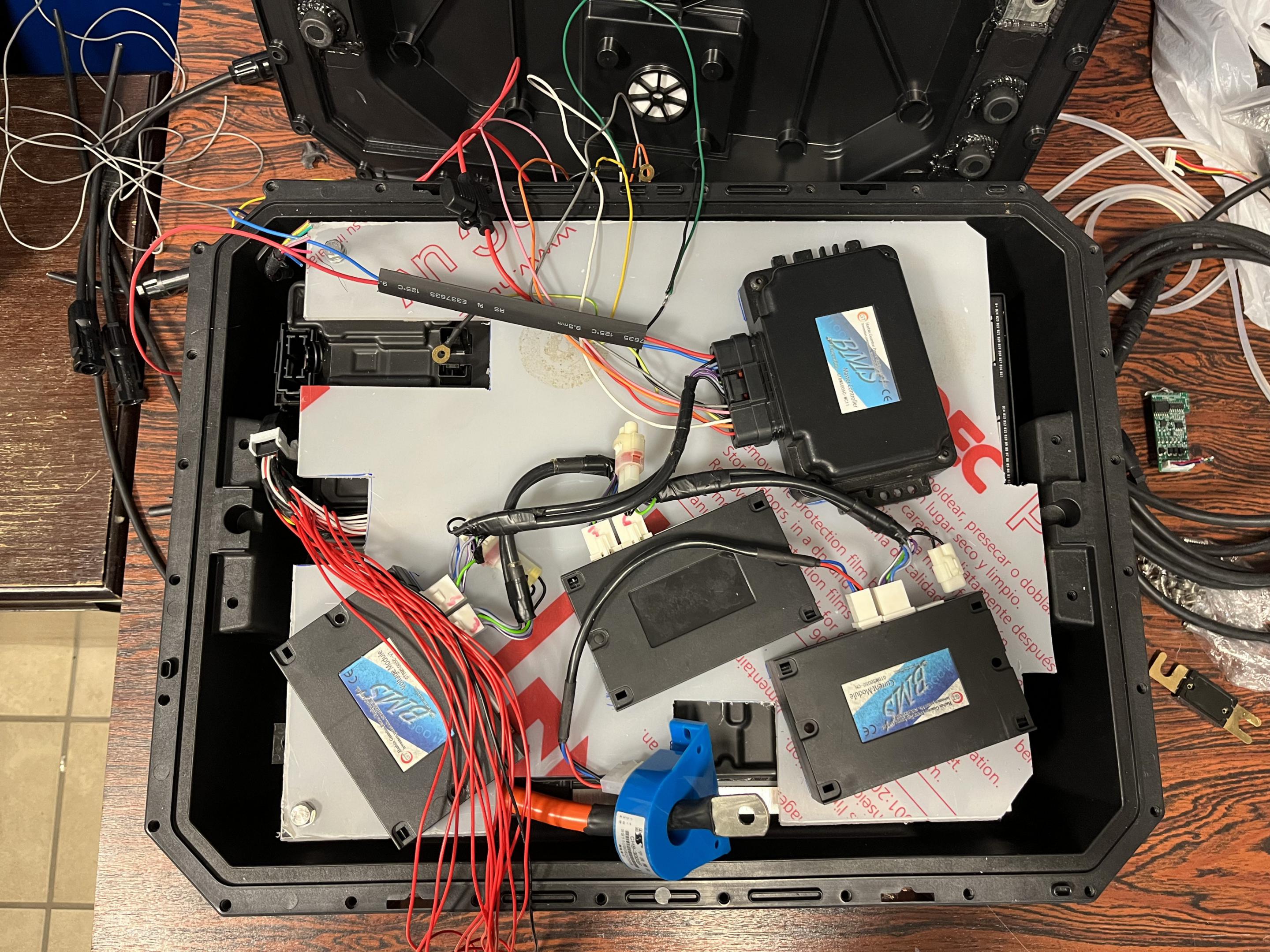

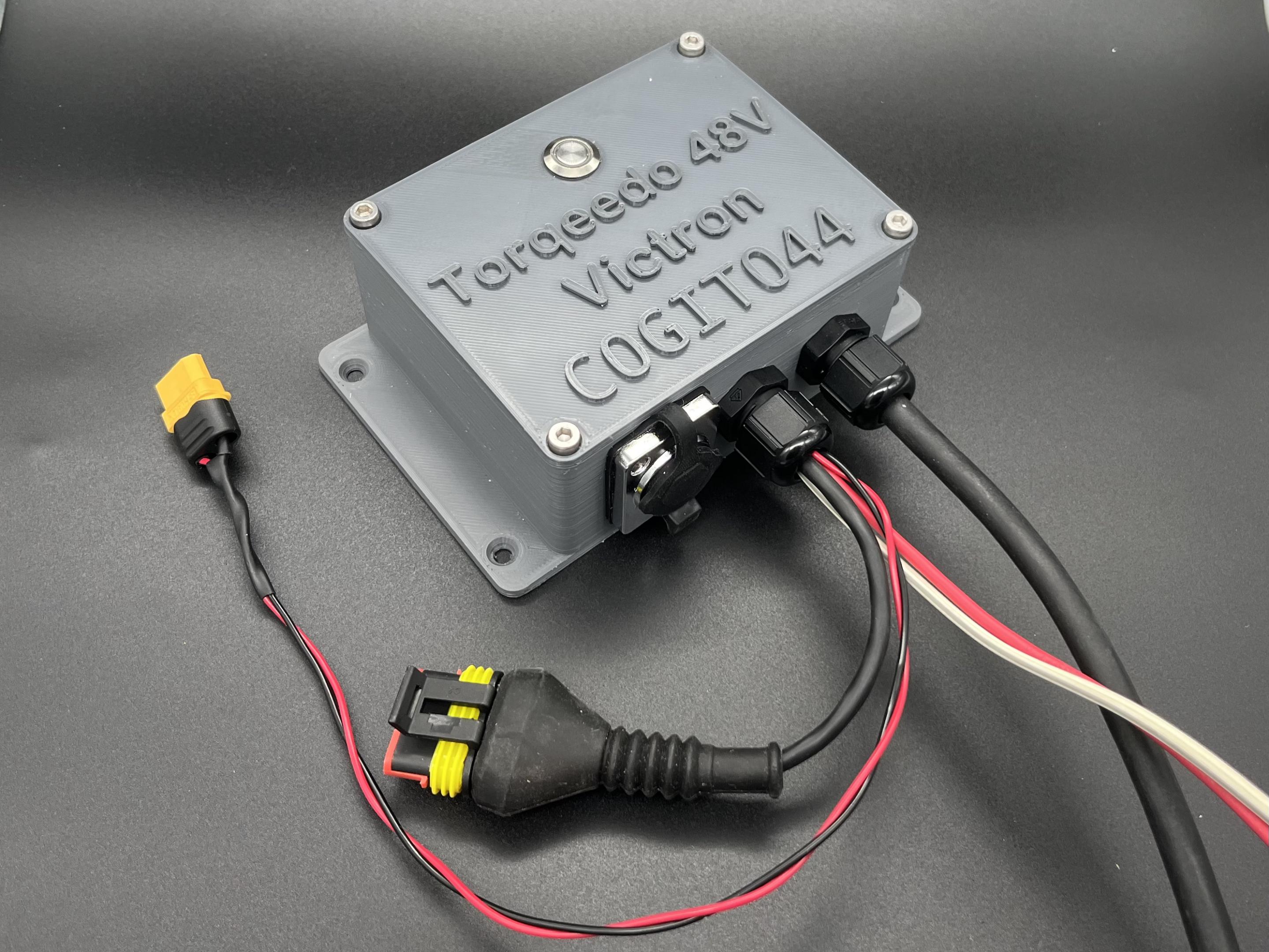
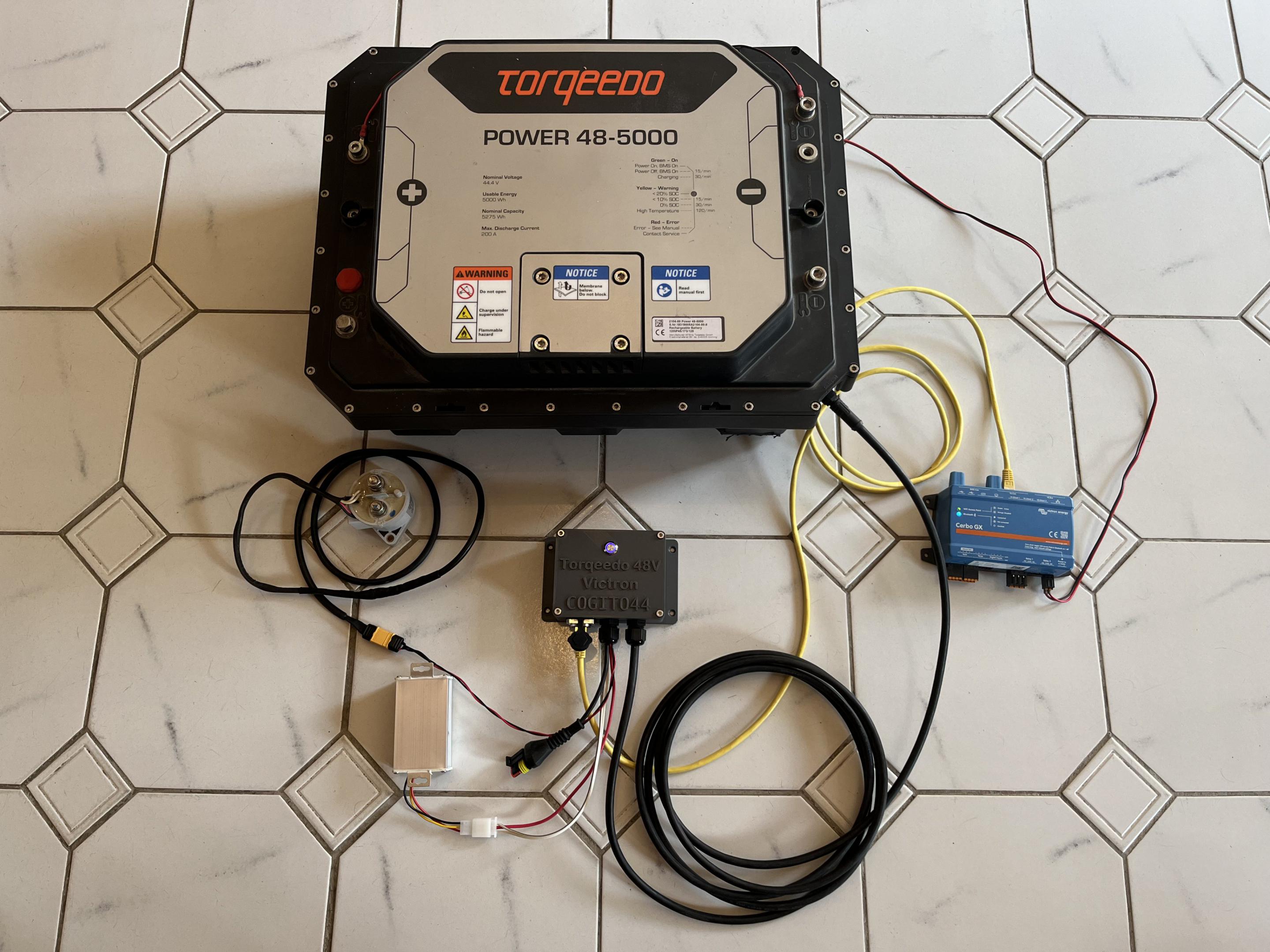

Ce module permet de faire communiquer ma batterie Torqeedo 48-5000 avec les systèmes GX de Victron. Ce qui permet d’optimiser la charge et de remonter les données et défaut sur VRM. Il est possible de visualiser l'état des cellules sur son téléphone via une communication Bluetooth avec l’équilibreur.
La charge peut également passer par un chargeur Zivan via une commotion CAN.
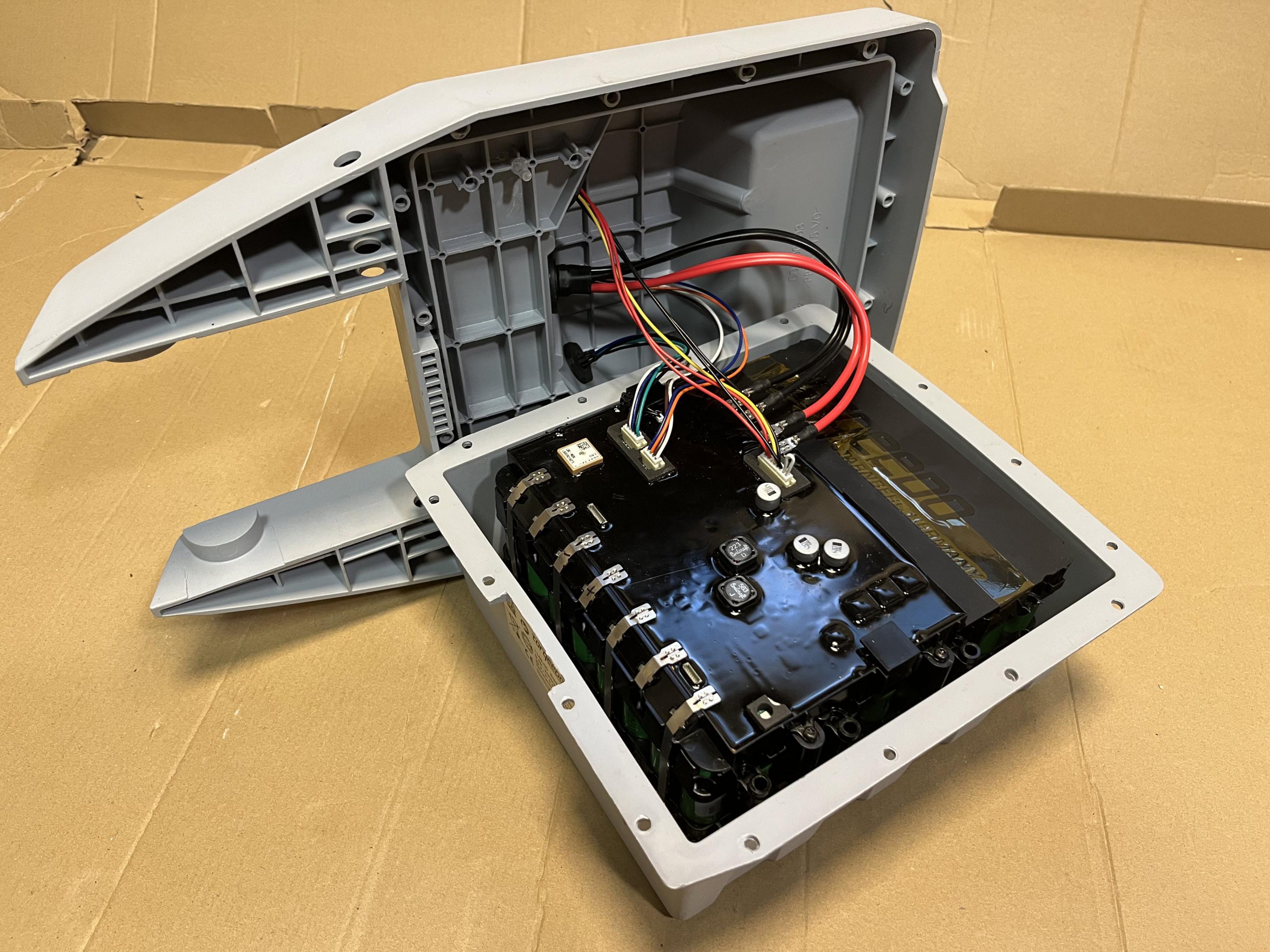
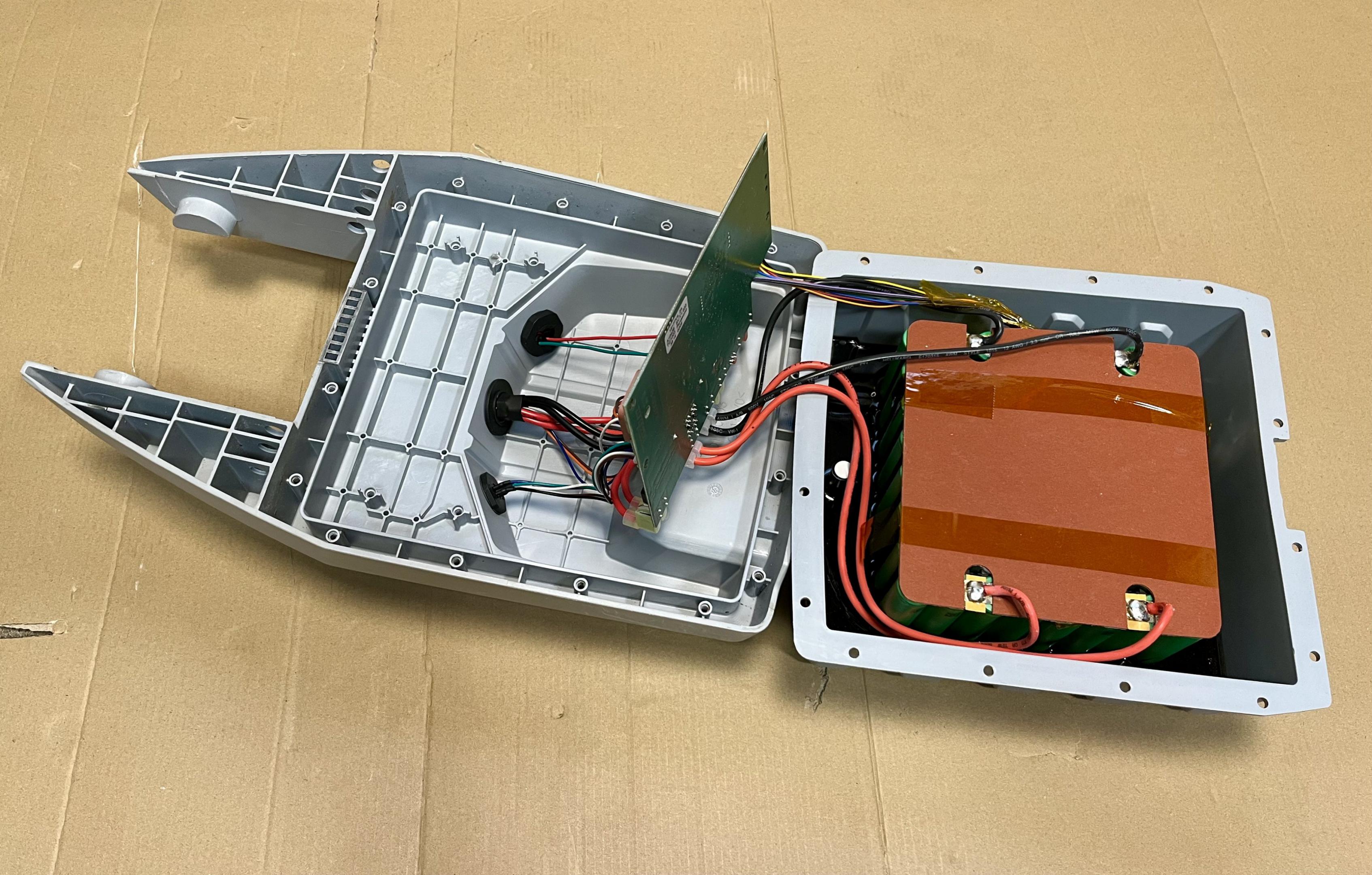
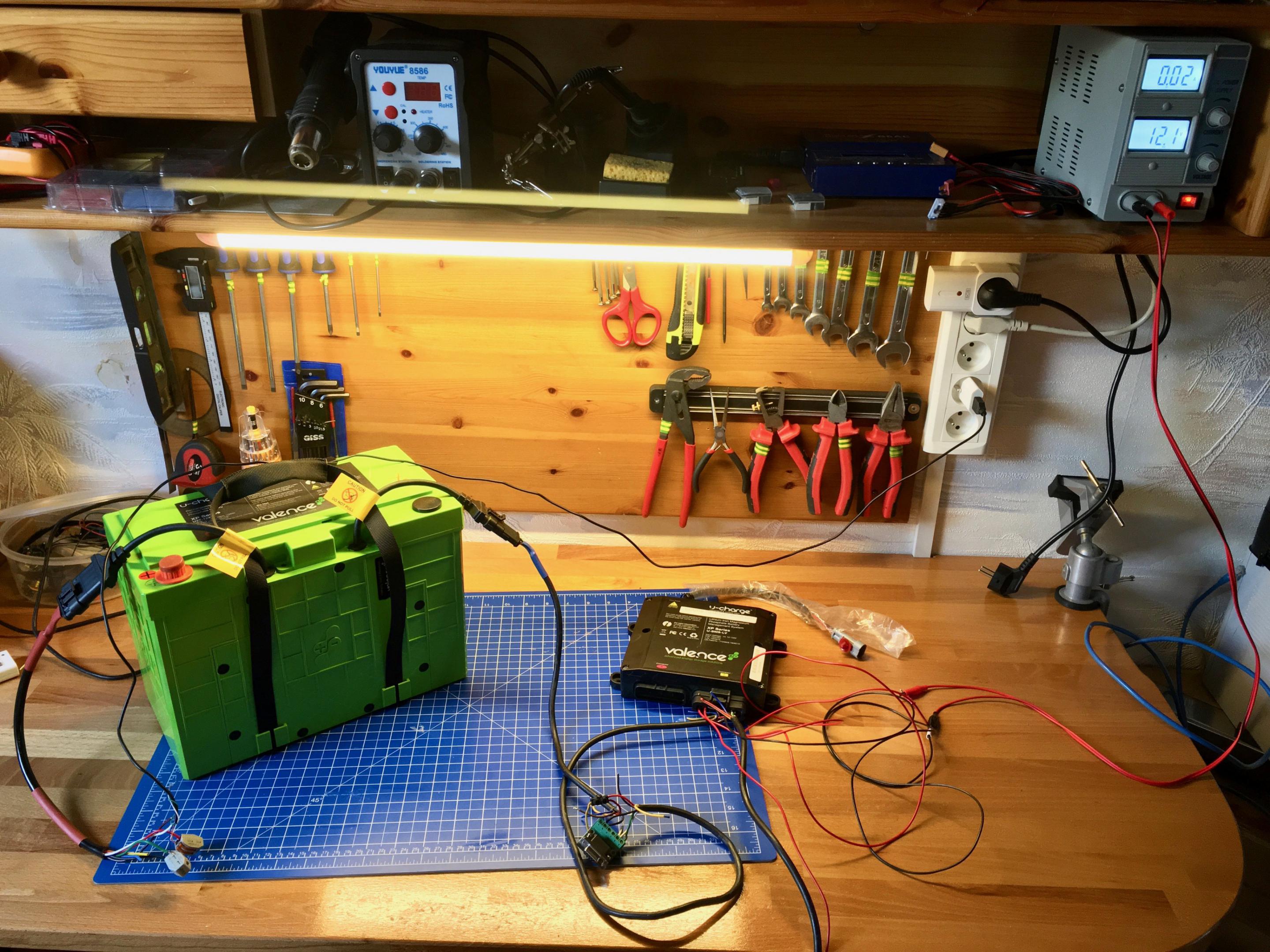
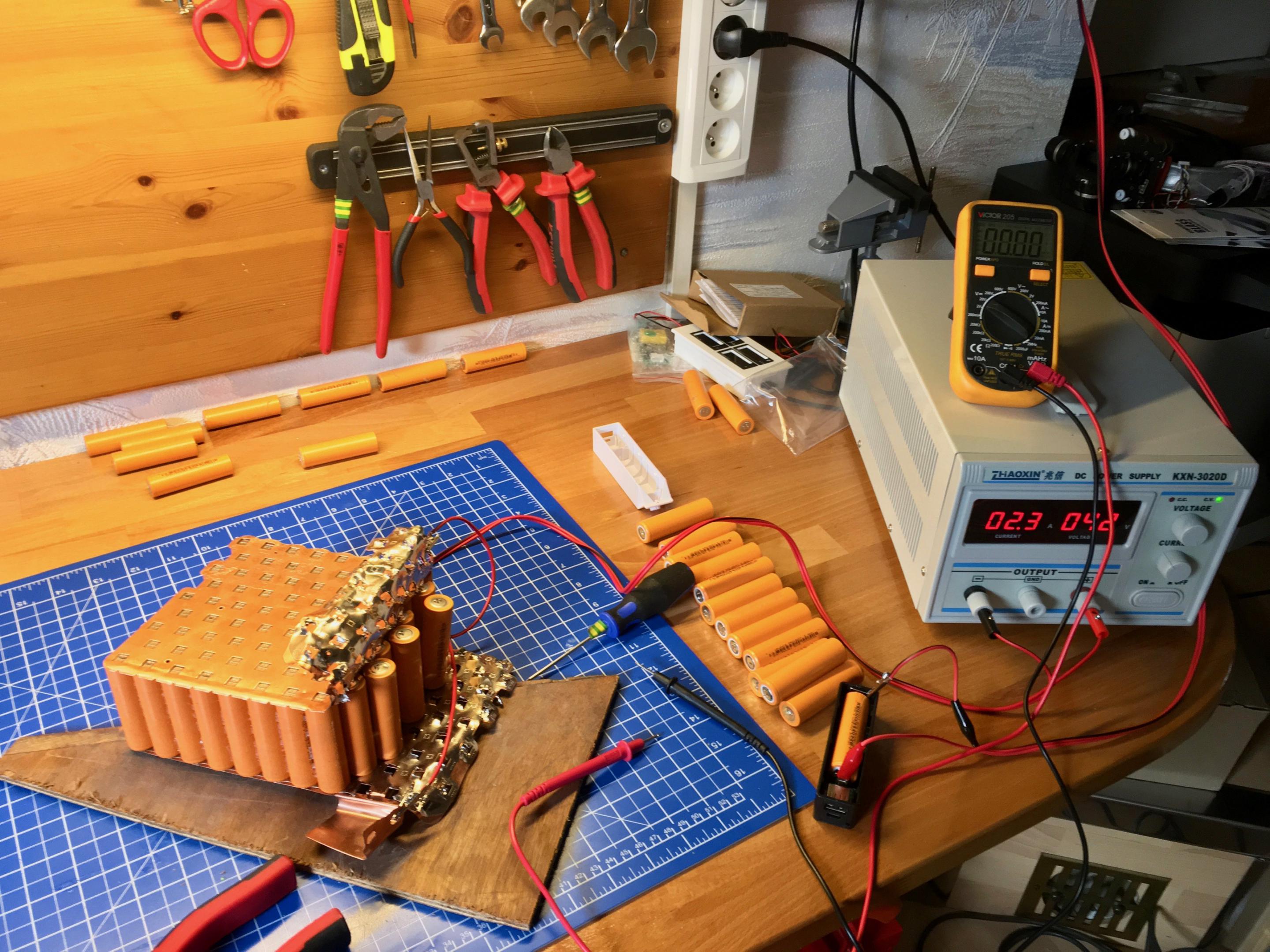
J'ai eu l'occasion de diagnostiquer et réparer plusieurs batteries Torqeedo conçues pour les moteurs hors-bord Travel ou Ultralight. Il existe deux types de conception :
⁃ D’ancienne génération, la réparation des cellules est impossible, car couler dans de la résine, mais la carte BMS est réparable.
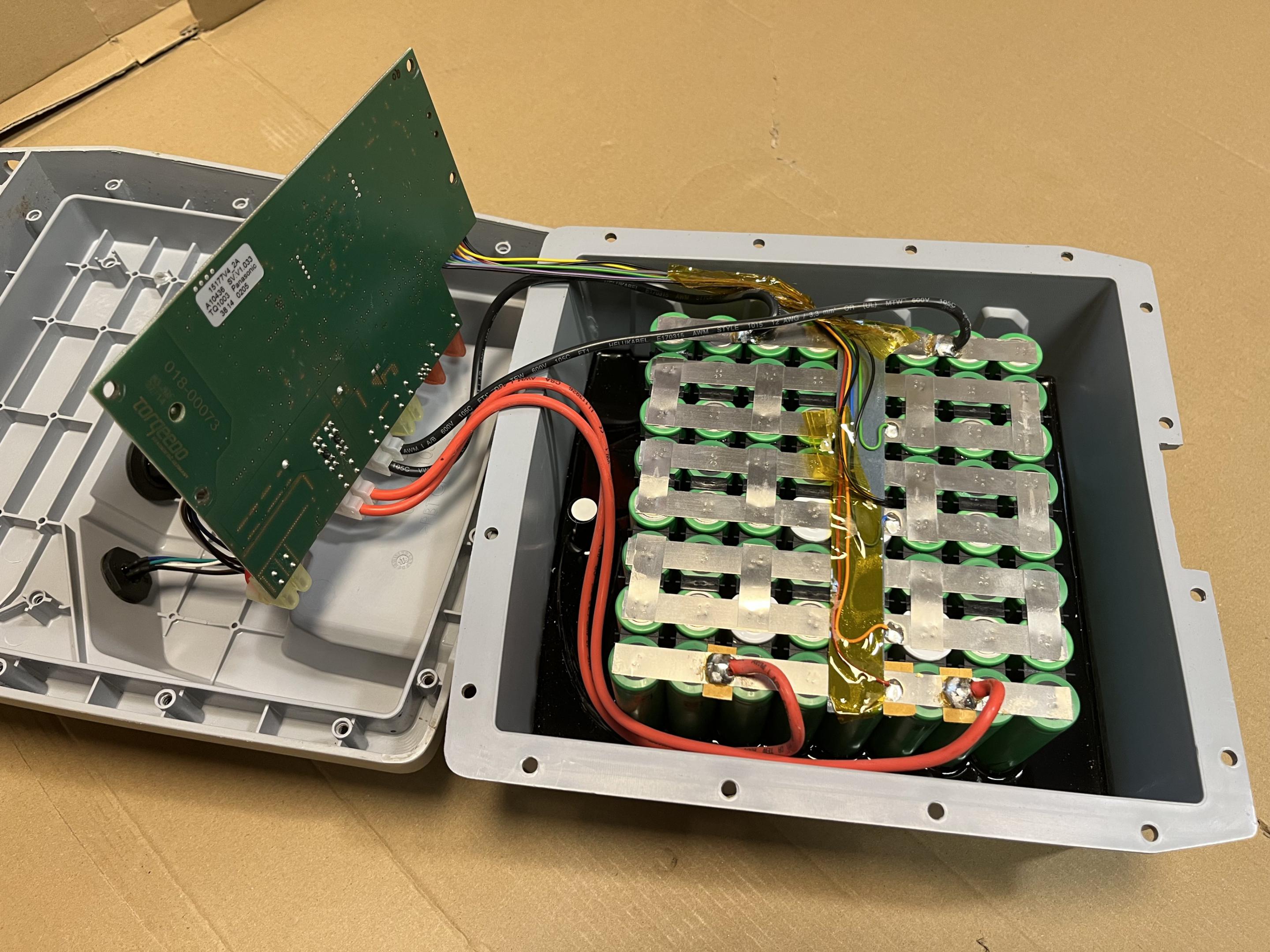
⁃ Les nouvelles générations, il est possible de remplacer les cellules, mais la carte BMS est coulée dans de la résine.
Il existe 3 capacités de batterie 330 Wh - 11,25Ah , 532 Wh - 18 Ah et 916 Wh - 31,5Ah. Leurs tensions nominales sont toutes de 29,6V en 8S, avec des cellules de 18650 NMC. Les modèles de 330 Wh et 532 Wh on respectivement 5 et 8P en 2,25 Ah et les 916 Wh on 9P en 3,5 Ah.
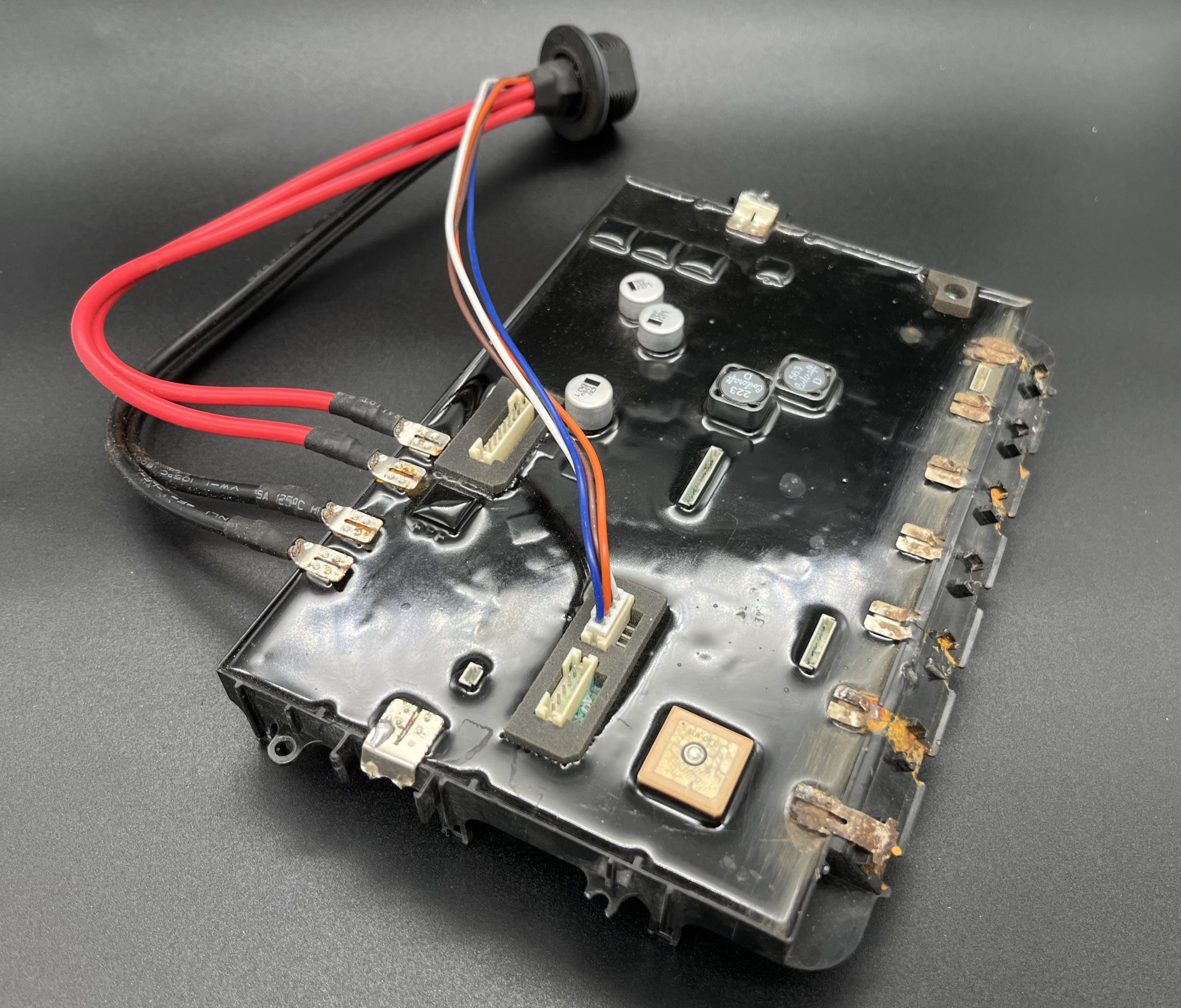
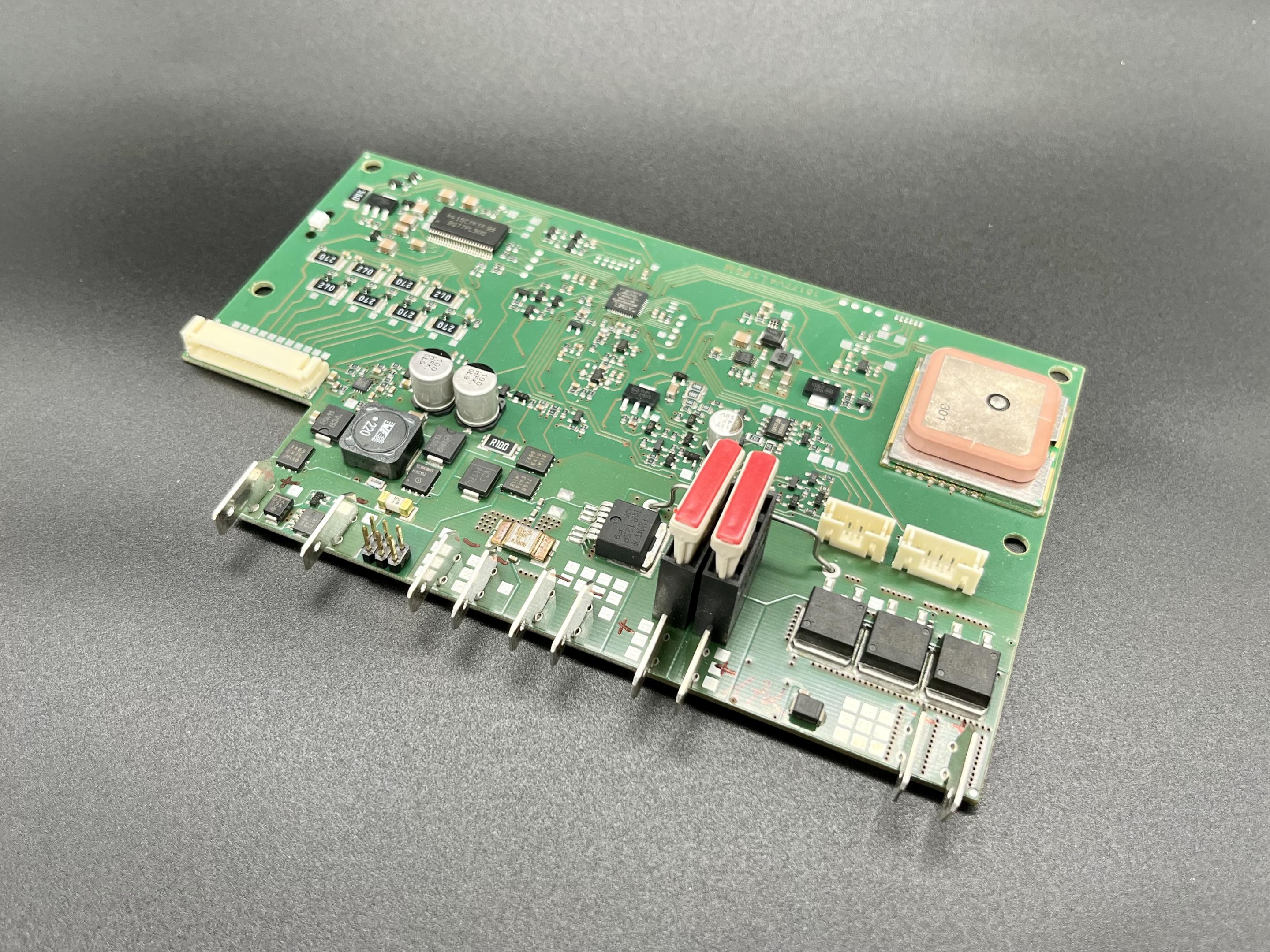
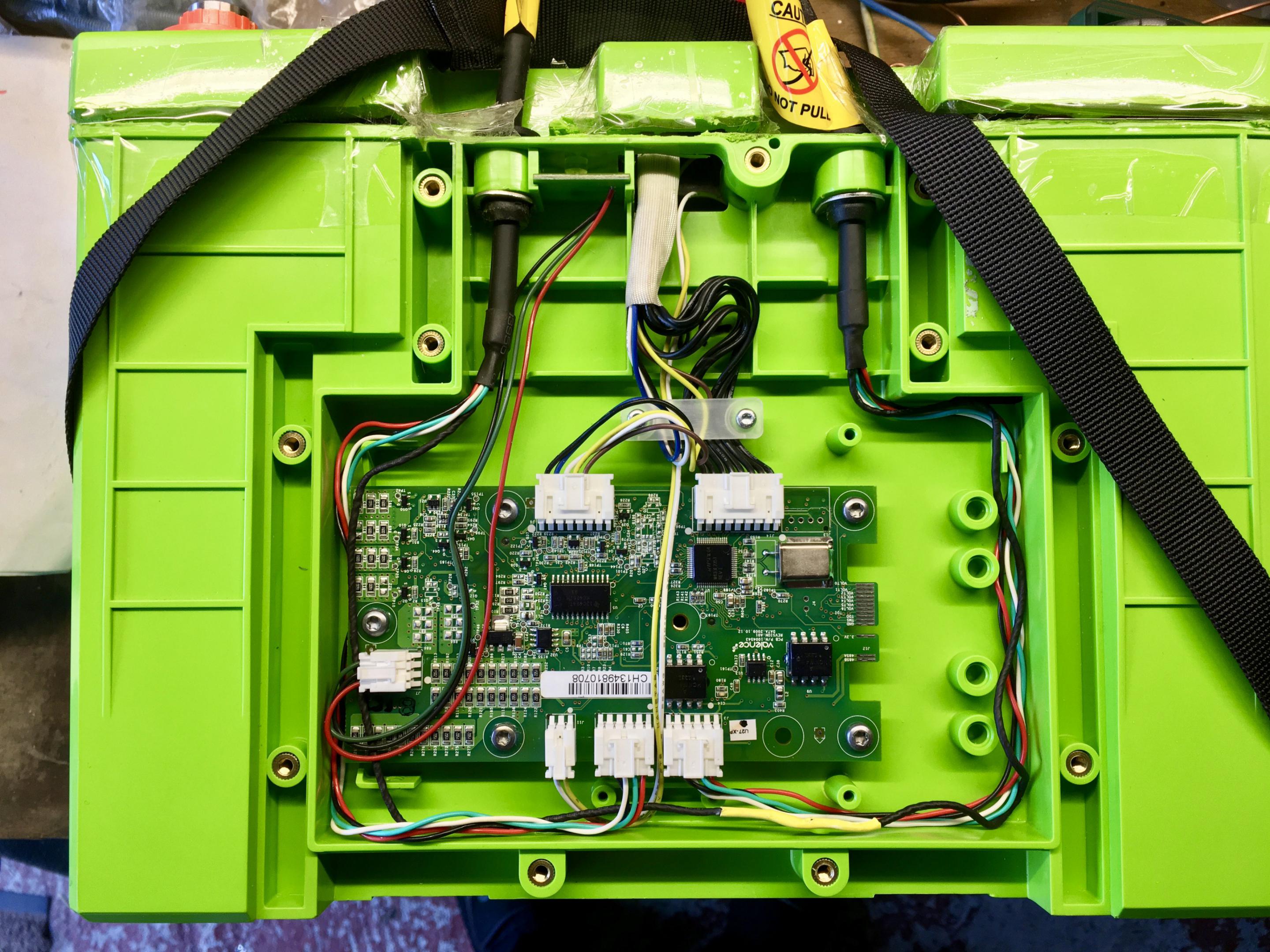
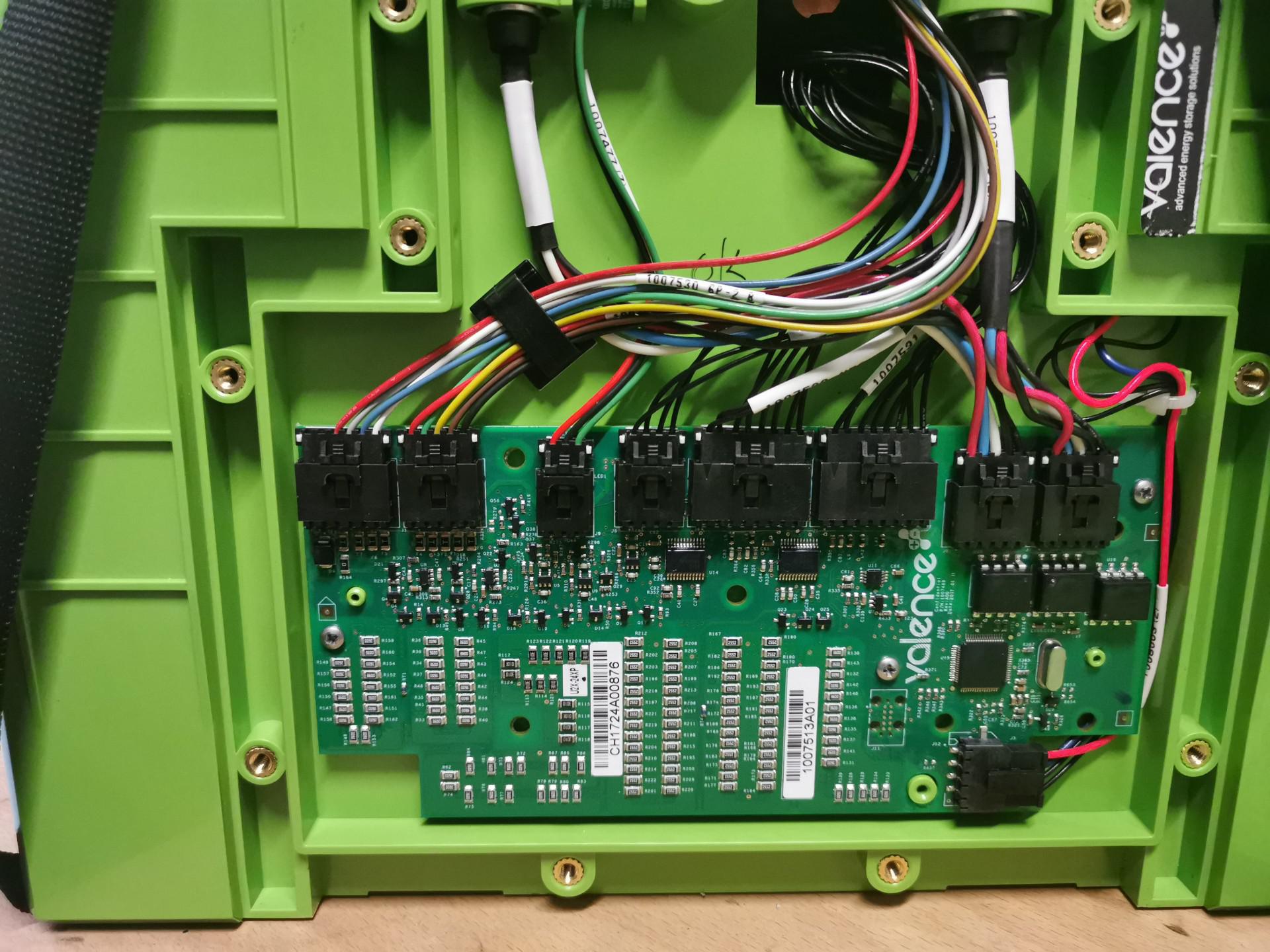
Les cartes BMS concentrent l’essentiel de l'intelligence de leur système, elle communique via une communication série avec la télécommande ou la barre franche pour transmettre des informations de la batterie et du moteur ainsi que de la puce GPS si tu es sur la carte BMS. Elle permet également de transmettre les informations également via une communication série vers le variateur du moteur brushless.
La puce GPS permet de déterminer la vitesse du bateau et grâce au calcul de consommation du moteur cela permet de donner une indication de distance restante sur l'afficheur.
Batterie Torqeedo Travel

UCVE 1.0
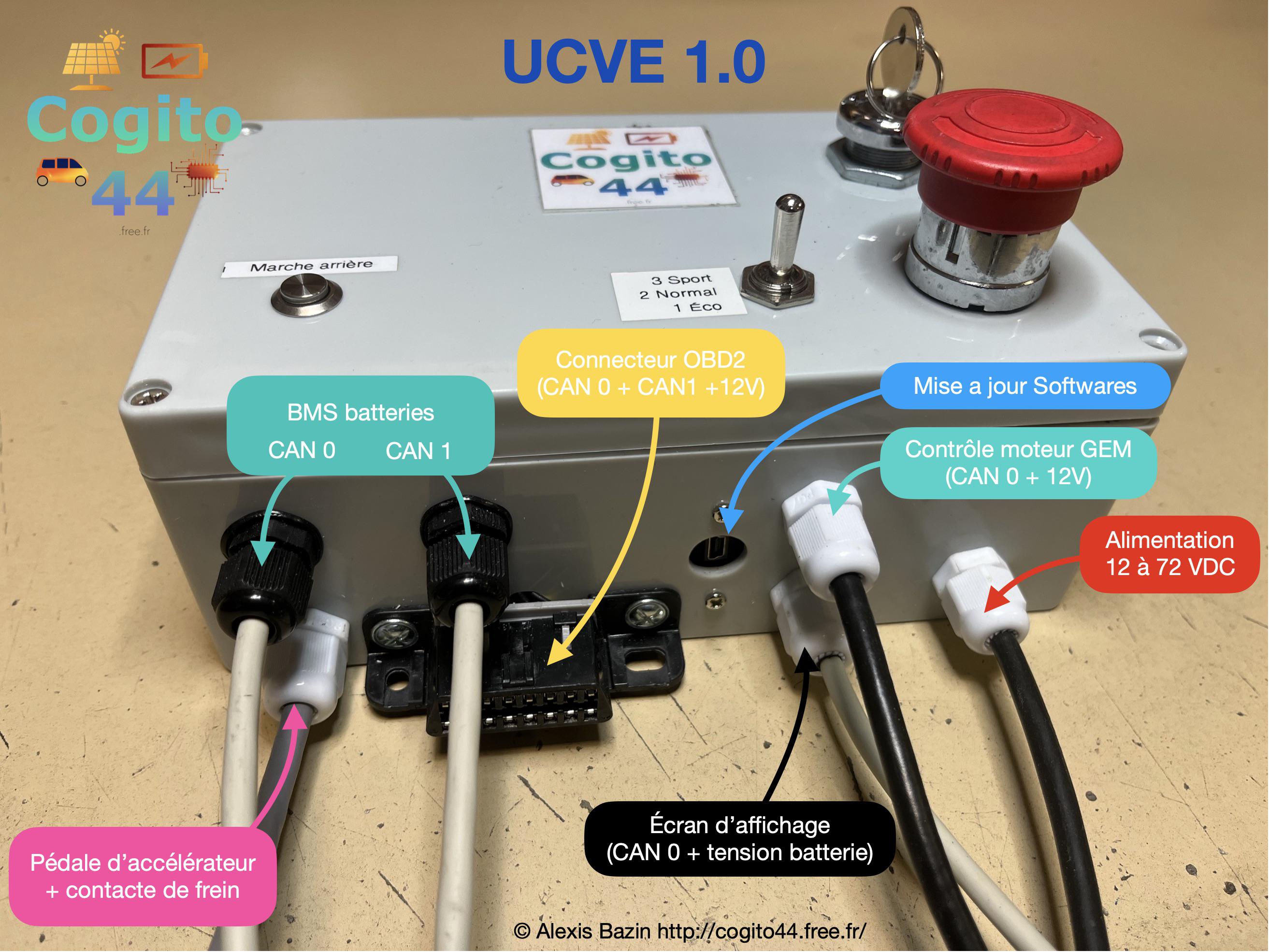
Pour les besoins du projet Avatar, j'ai développé une Unité Centrale pour Véhicules Électriques (UCVE). Cette unité centrale permet la gestion des différents organes d'un véhicule électrique, comme son moteur, sa batterie ou encore son écran d'affichage.
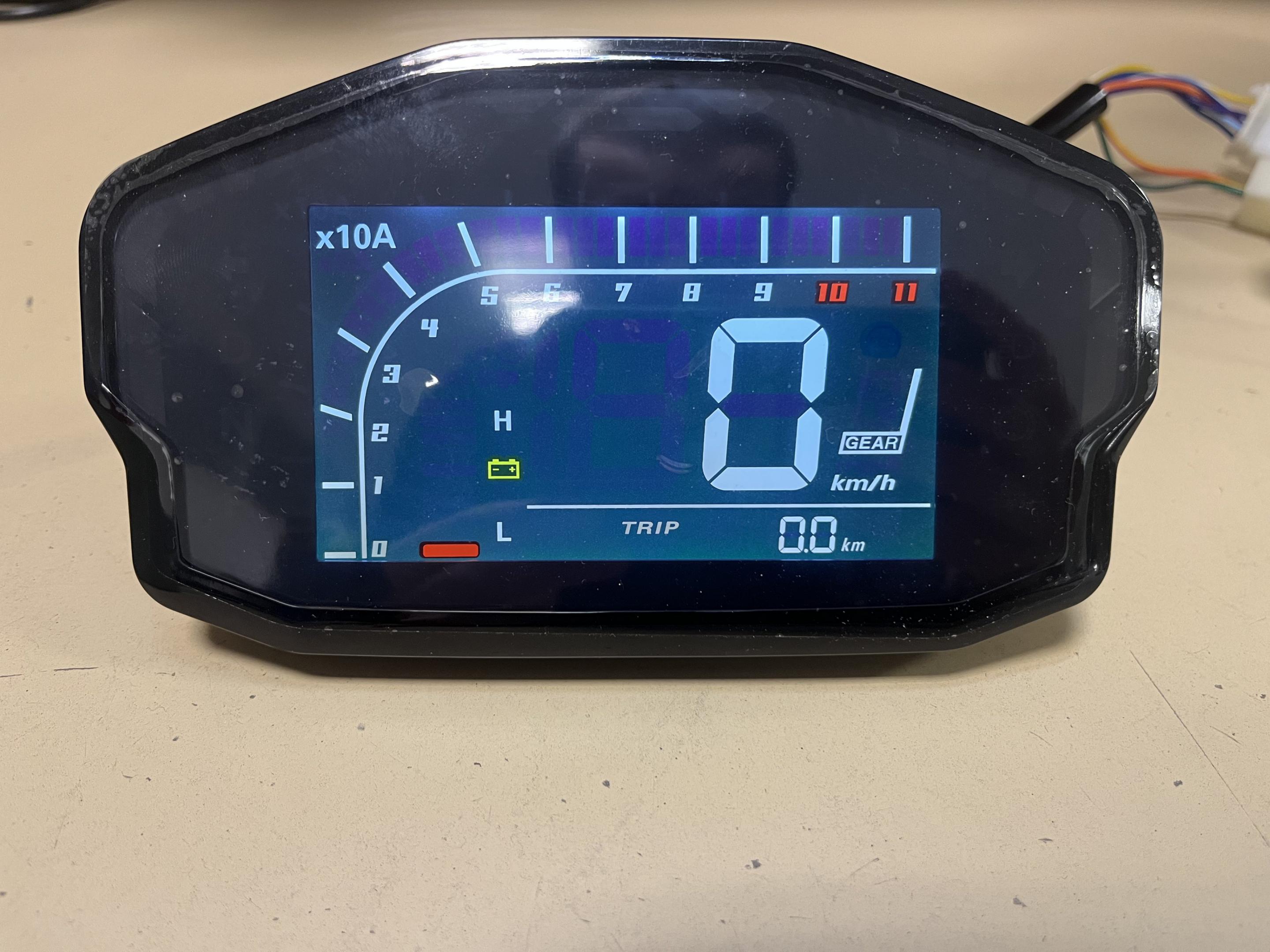
Je l'ai conçu pour qu'il soit le plus modulaire possible, dans sa première version, il permet de gérer 2 moteurs roue GEM G2.4, 2 batteries en parallèle avec BMS CAN, un écran de moto électrique CAN.
Il peut gérer 2 réseaux CAN séparée, qui peuvent avoir des vitesses différentes.
Pour la partie analogique, il gère :
⁃Une pédale d’accélérations de C-ZEN (Standard PSA) avec capteur de point dur.
⁃Le contact de la pédale de frein.
⁃Un bouton-poussoir pour la marche avant / arrière.
⁃Un bouton 3 positions pour le mode sport, normal et éco.
⁃Une clé de contact avec « démarreur ».
⁃Un arrêt d'urgence.






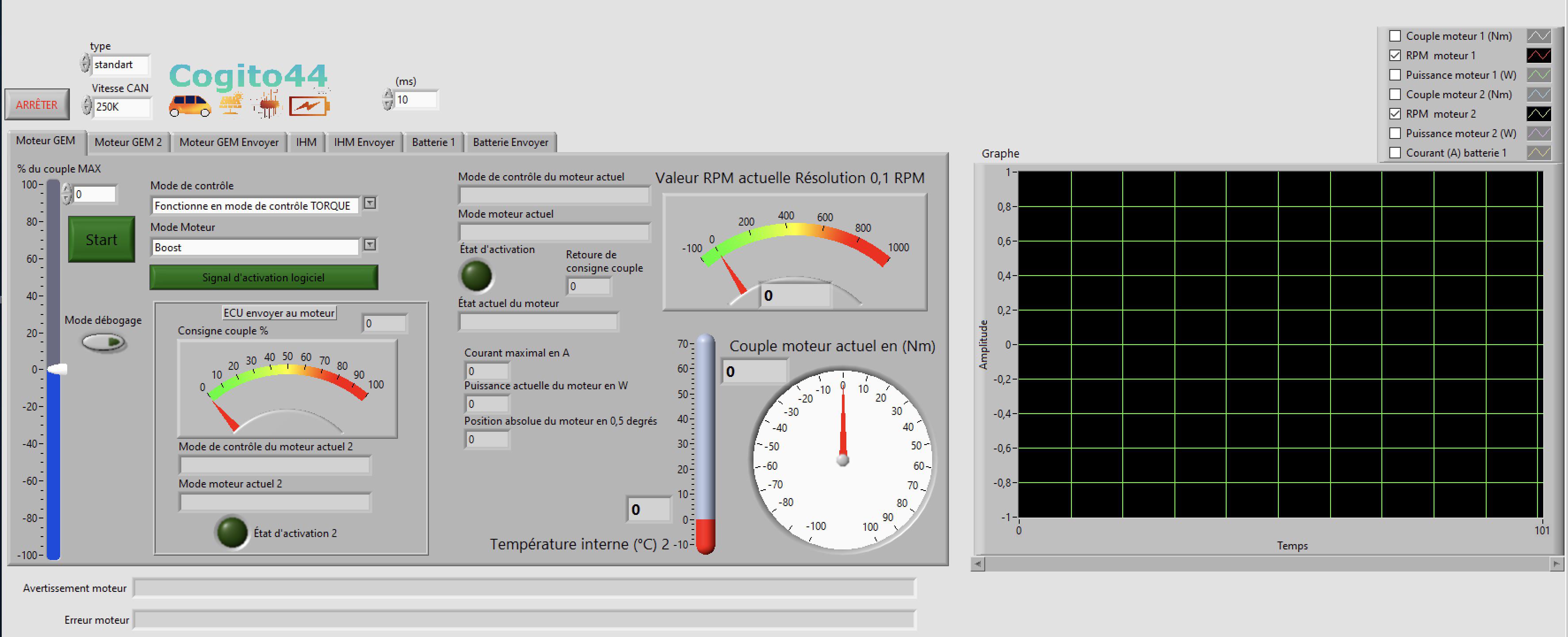
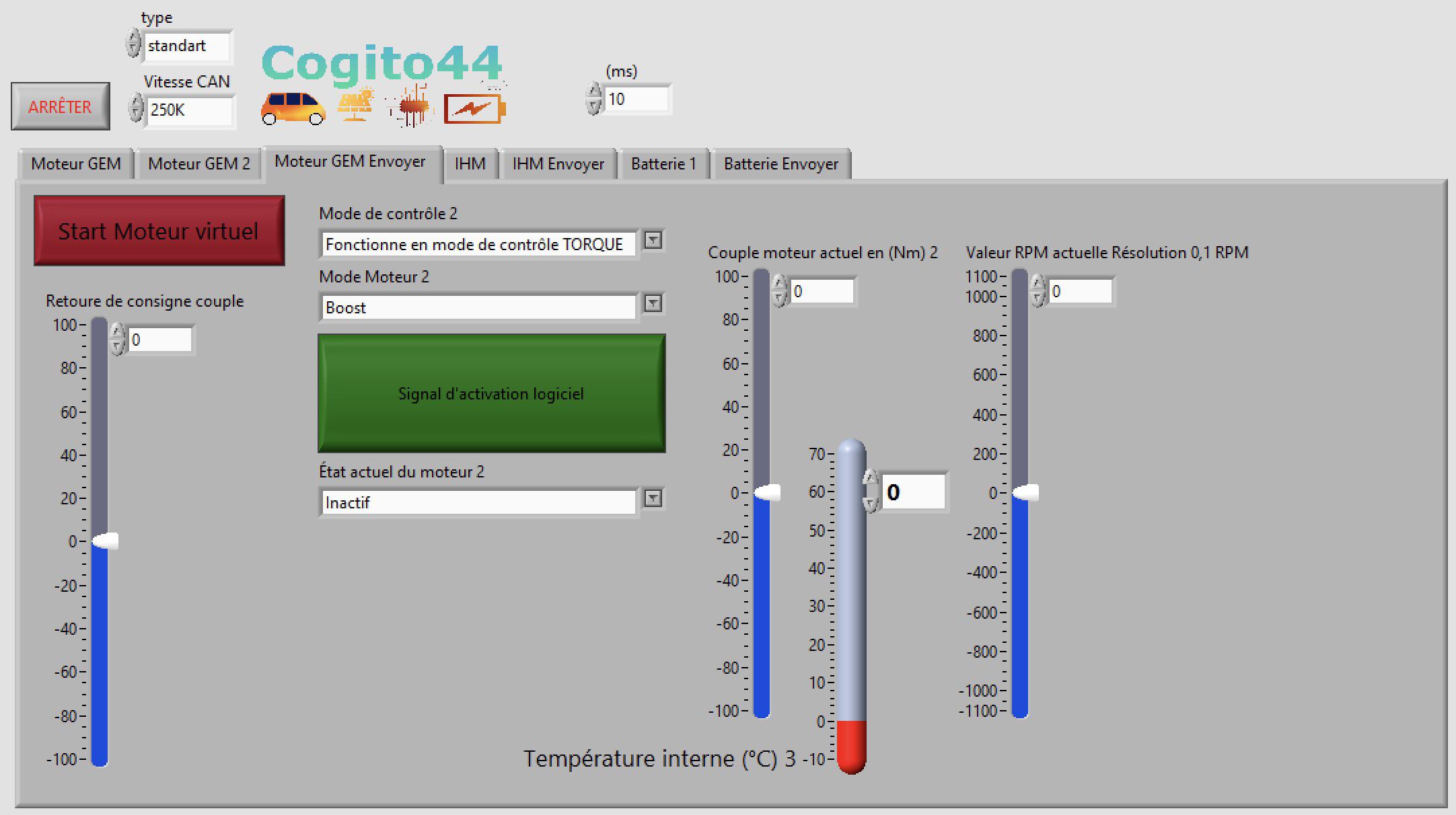
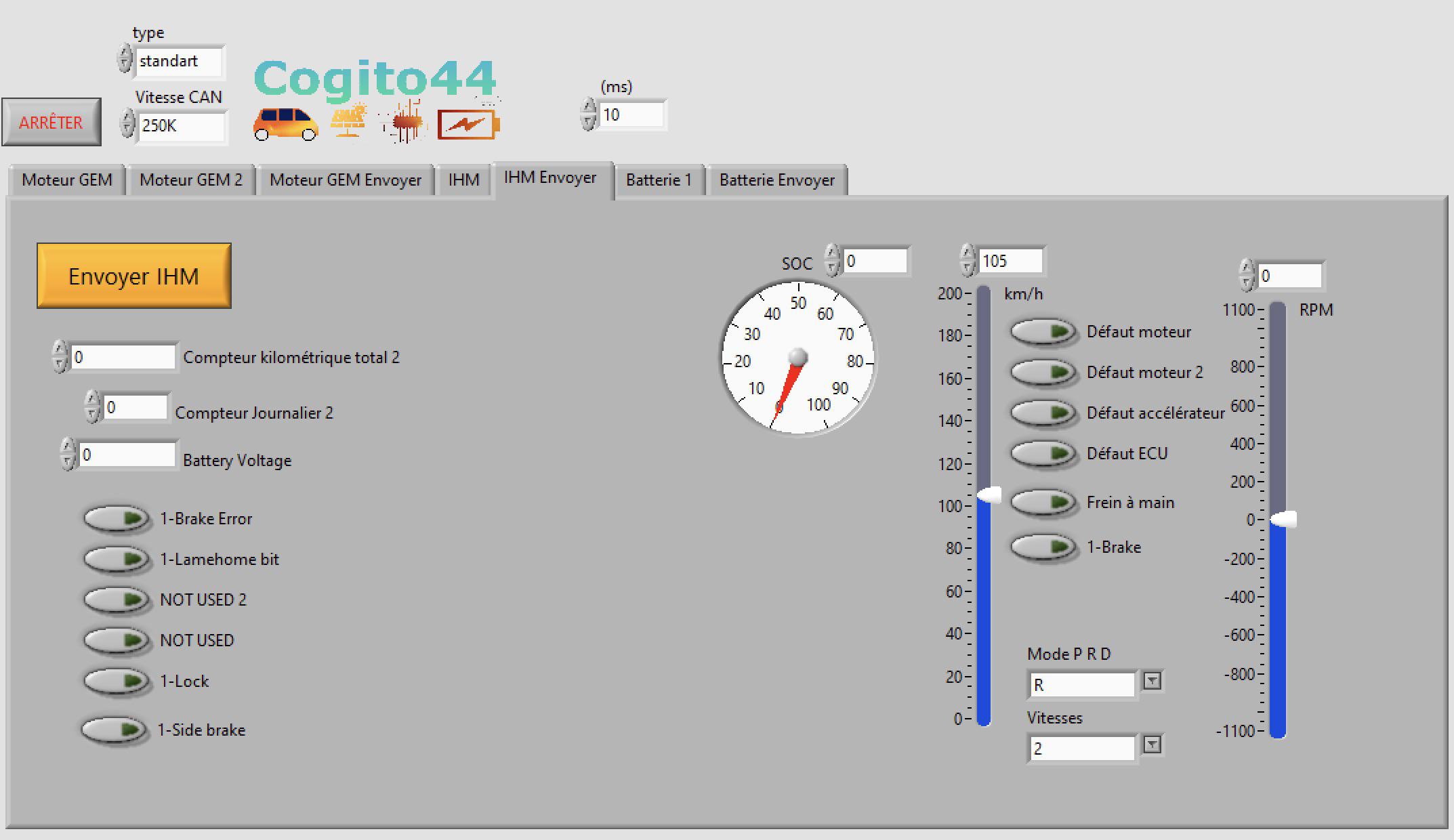

Logiciel de développement UCVE
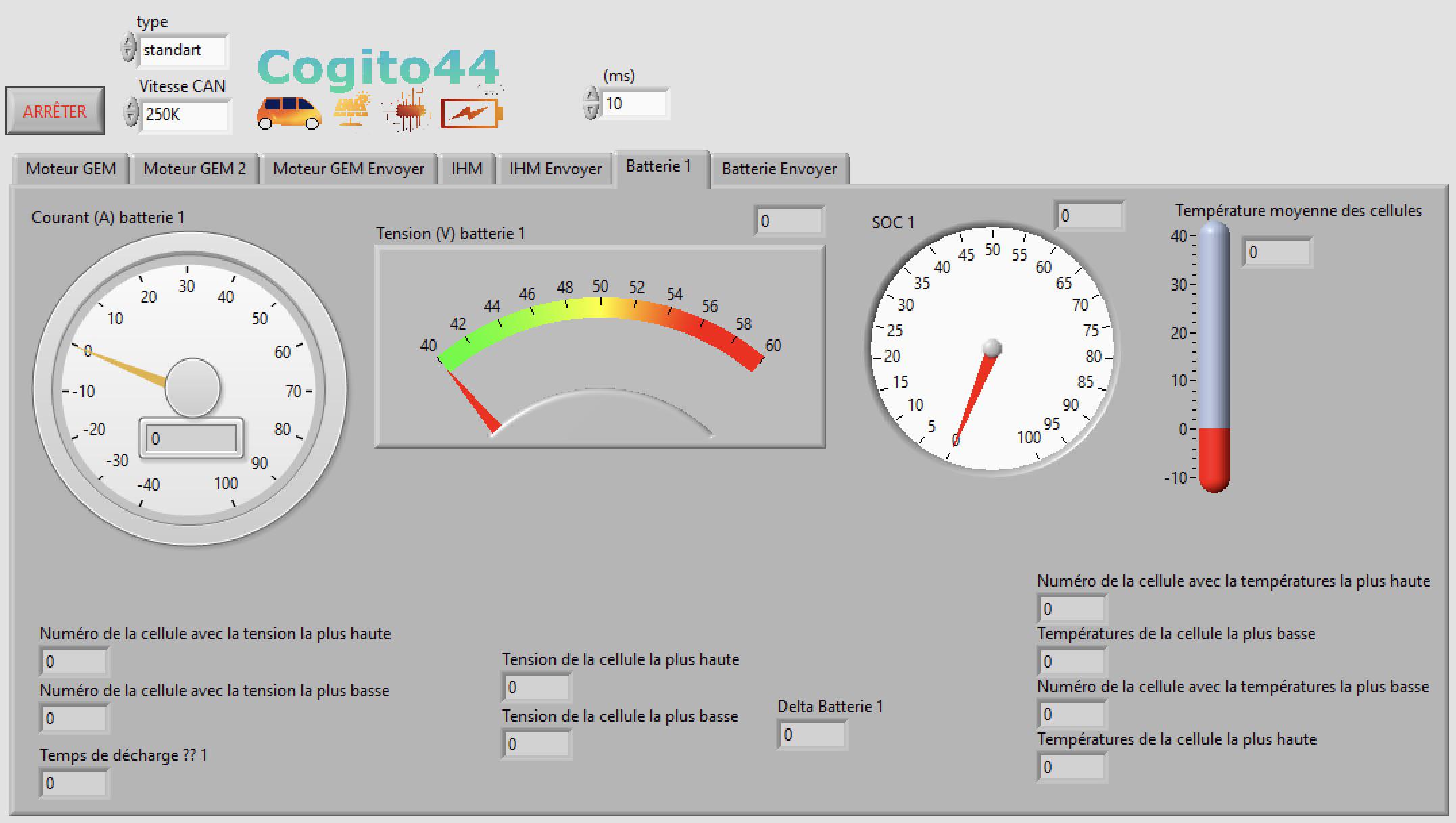
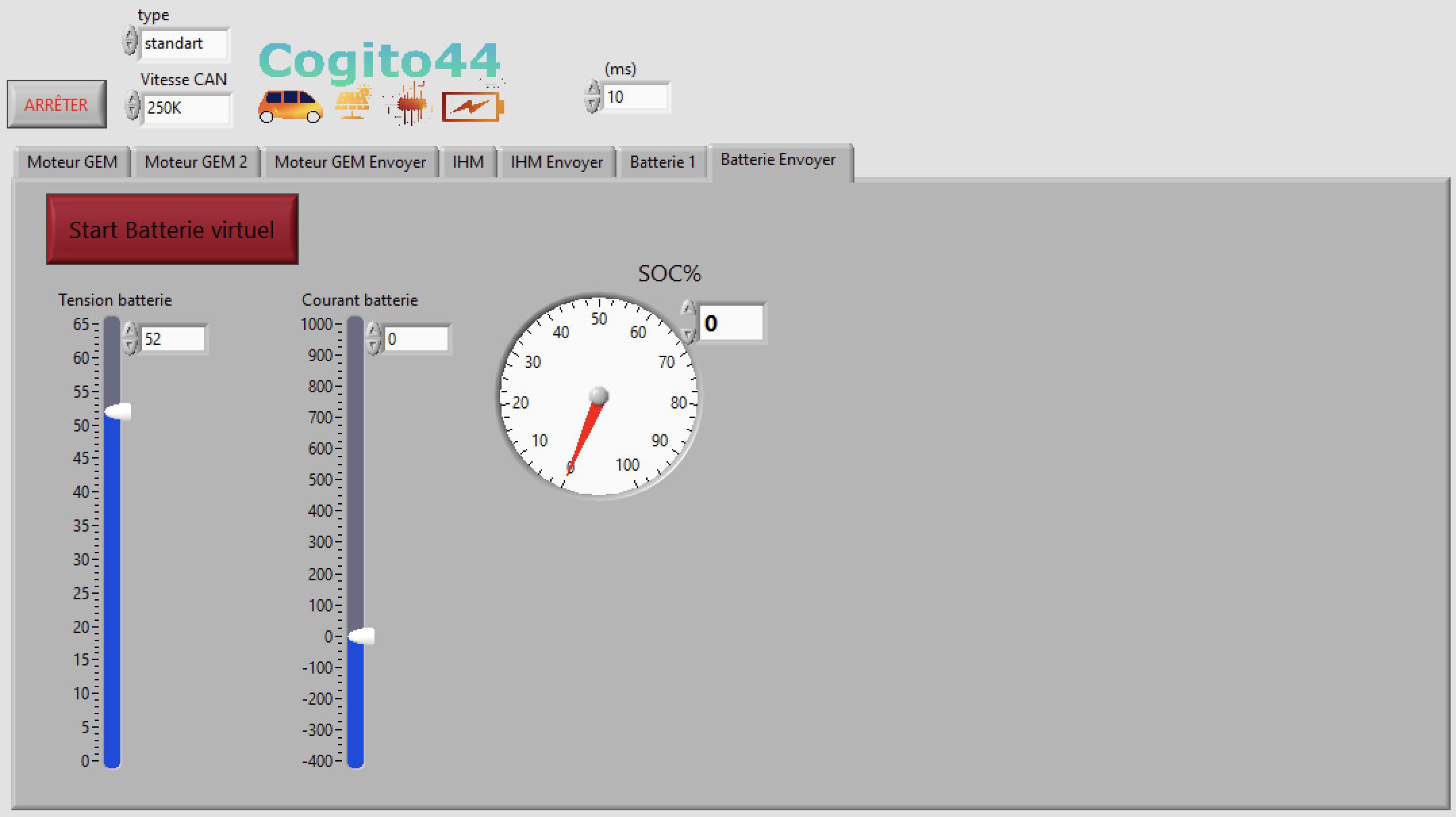
Pour optimiser le développement sur différentes plates-formes, j'ai créé un logiciel qui peut simuler au choix une ou deux batteries, les moteurs ou encore l'écran d'affichage. Cela me permet de tester sur tables différents fonctionnements. Ce qui accélère le temps de développement sur le véhicule.
Le logiciel affiche de manière dynamique les données provenant de UCVE et des différents organes qui y sont raccordés, avec la possibilité de les visualiser sur un graphe déroulant.
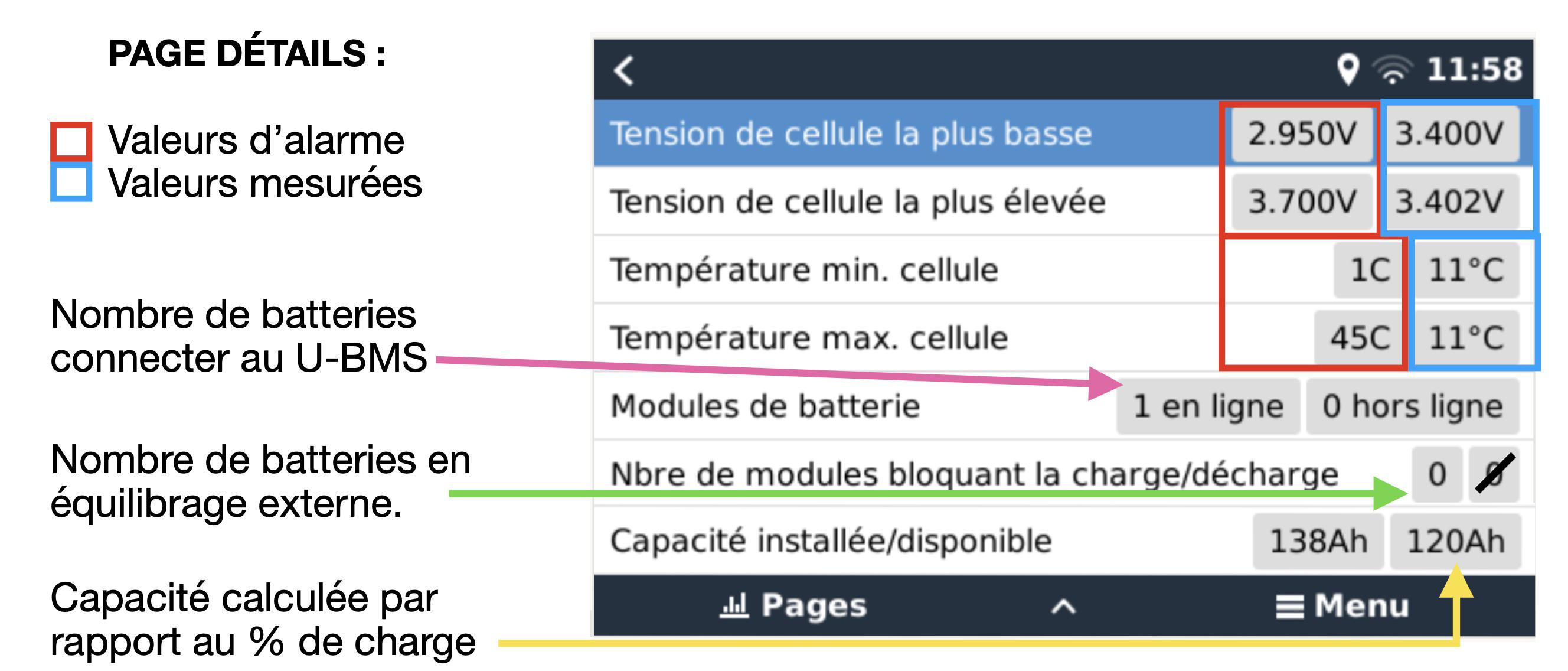
Supervision Valence U-BMS
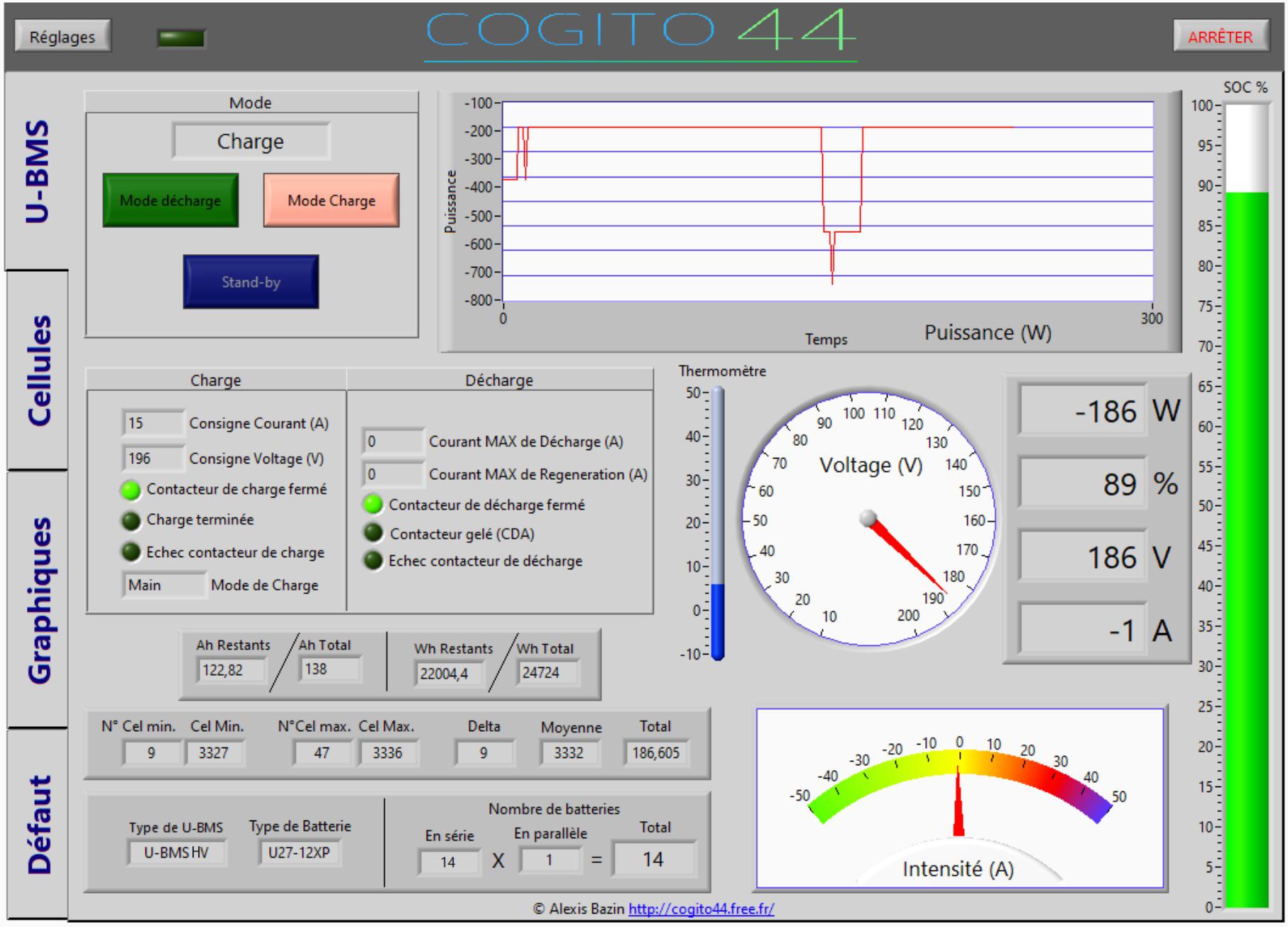
Le logiciel de Supervision des batteries Valence utilise la communication CAN du U-BMS pour récupérer et analyser les données et les présenter sous forme élégante et compréhensible par tous.
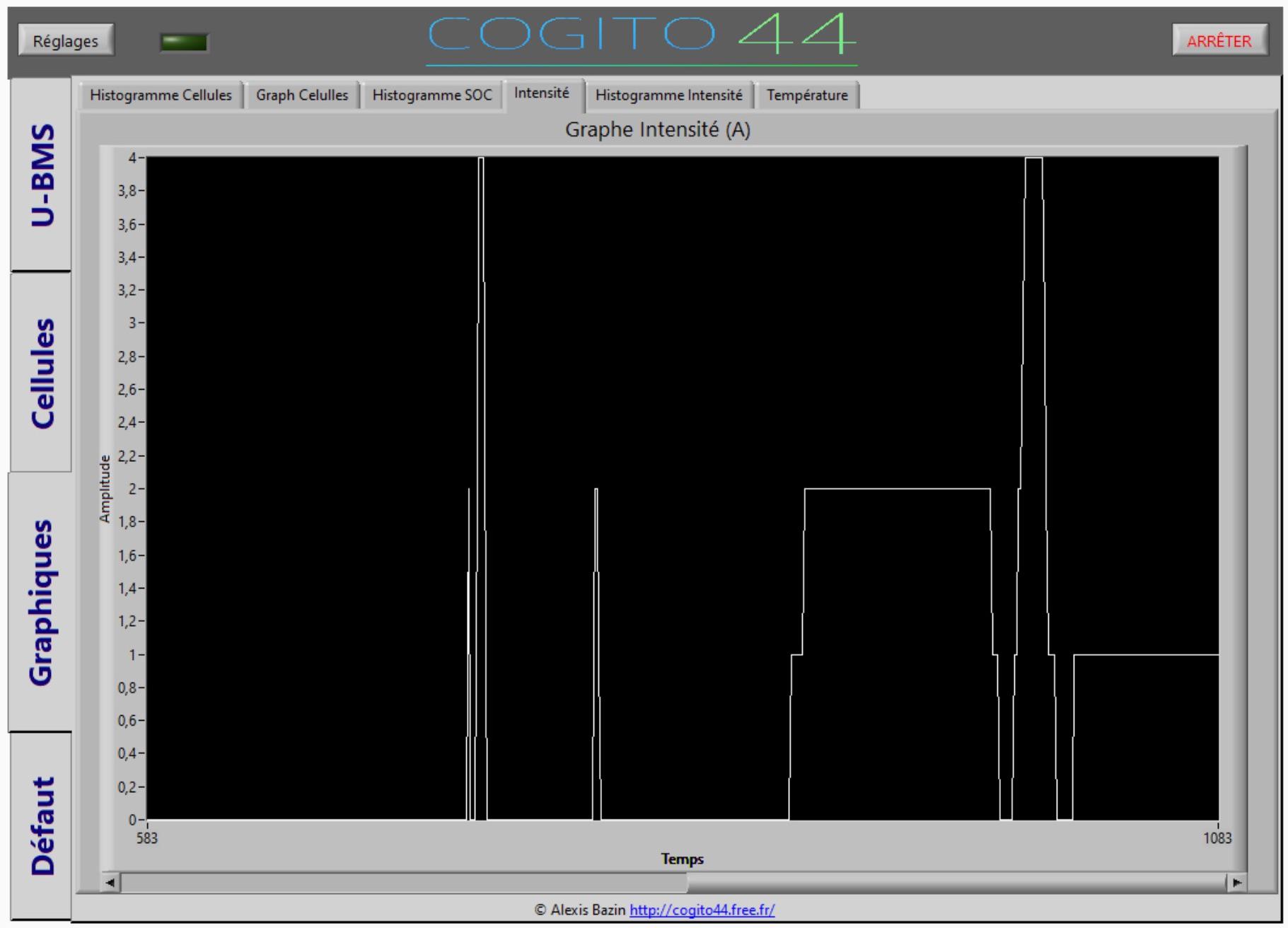
Sur la première page, il y a les informations essentielles comme, l’intensité, la puissance, le voltage, le niveau de charge de la batterie. Il y a d’autres éléments qui sont globaux au système.
Sur cette page, il est également possible d’activer le U-BMS en mode charge ou en mode décharge.
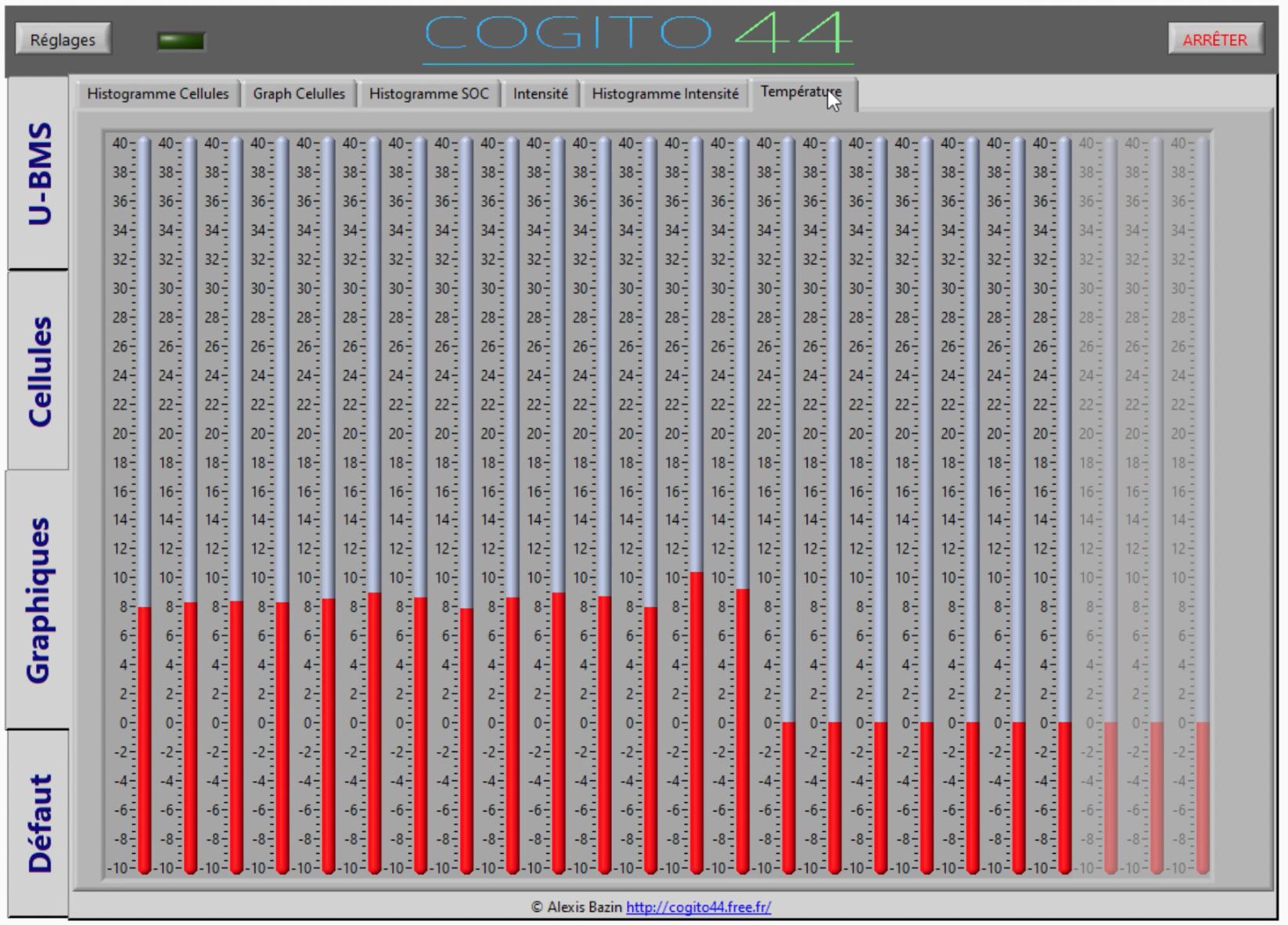
Sur la page Cellules, on retrouve le détail de toutes les tensions des cellules, si l’équilibrage interne est activé, le delta, la moyenne, le total, la température de la carte électronique, la température maximum, le niveau de charge, l’intensité, si la balance inter batteries est active.
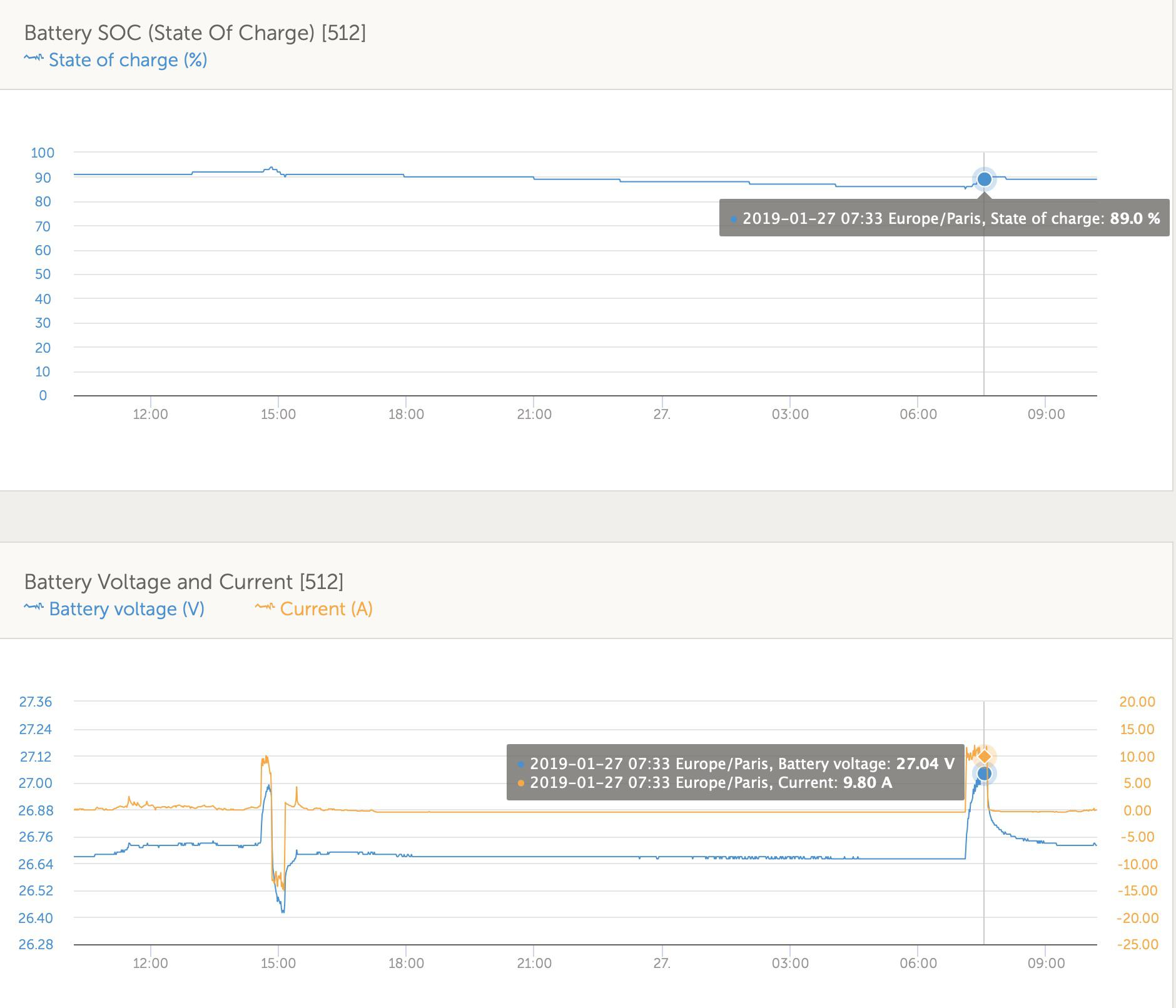
La page Graphique permet de visualiser de manière dynamique les tensions de cellules, les niveaux de charge, l’intensité et les températures.
La dernière page à Défaut affiche les avertissements, les alarmes et les coupures du contacteur. Elle affiche également les différents défauts remontés par le U-BMS.
En appuyant sur le bouton Réglages, on accède à une fenêtre qui permet de modifier la vitesse de lecture du réseau CAN ainsi que le type de batterie branché au U-BMS.
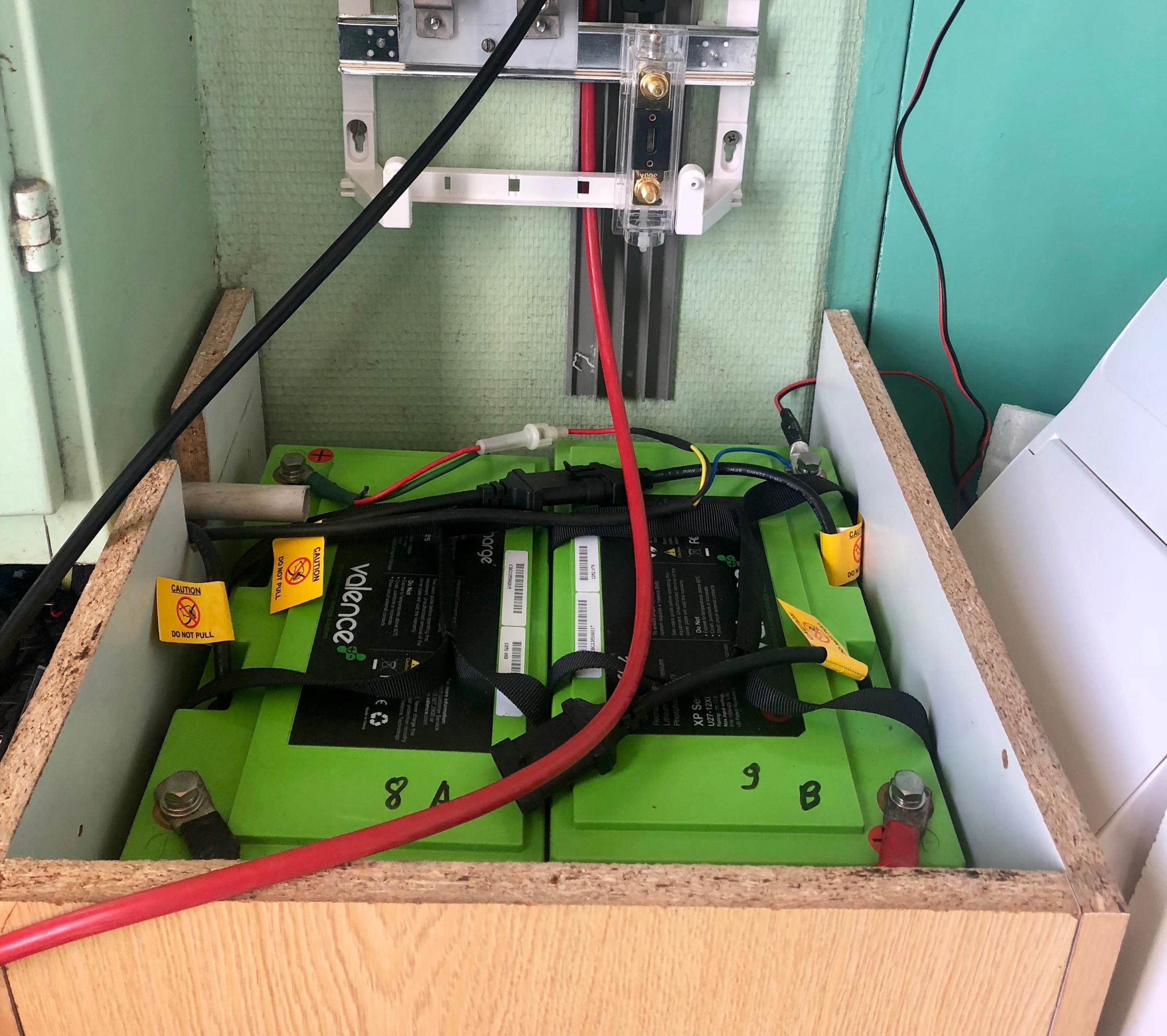
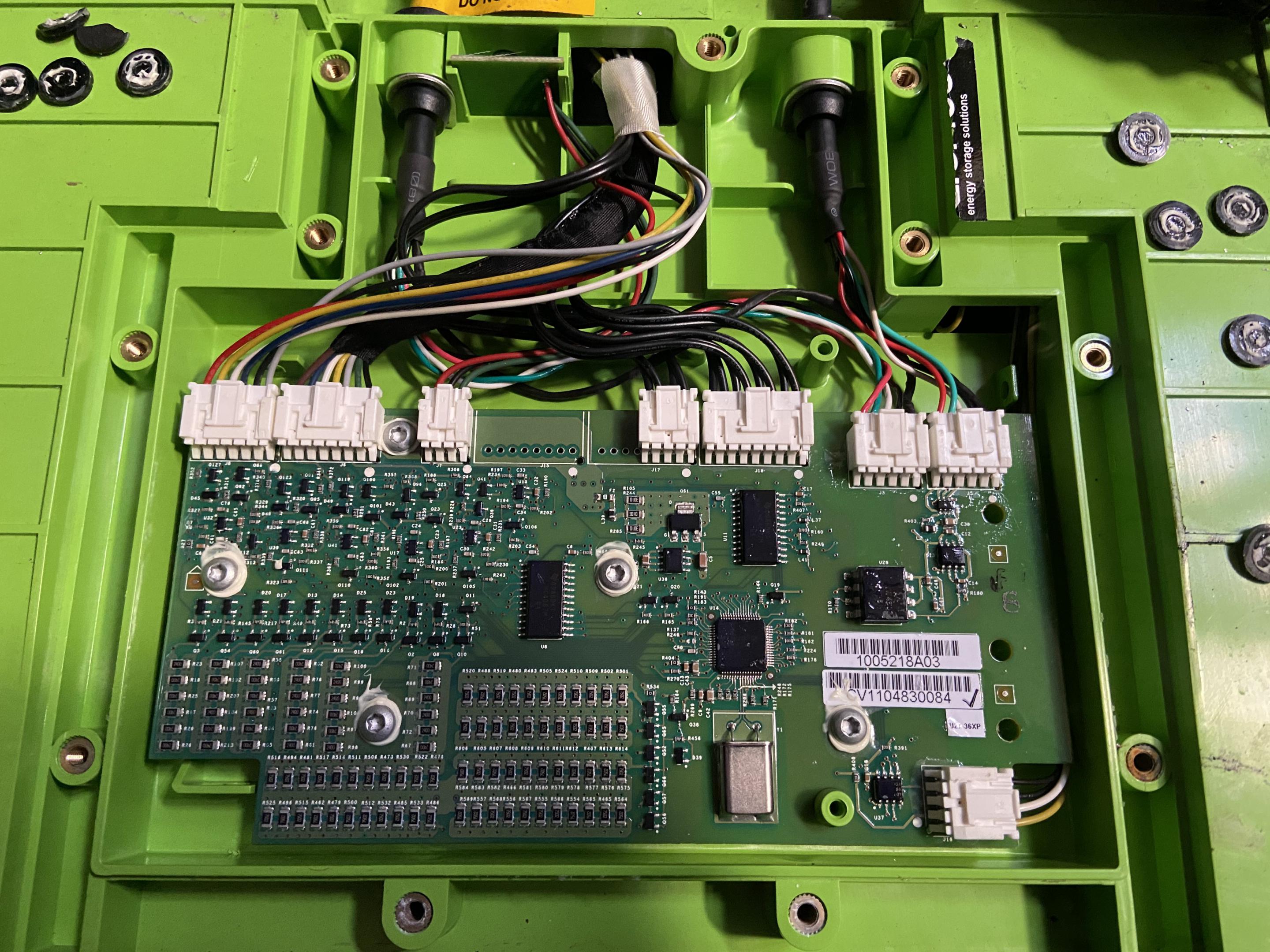
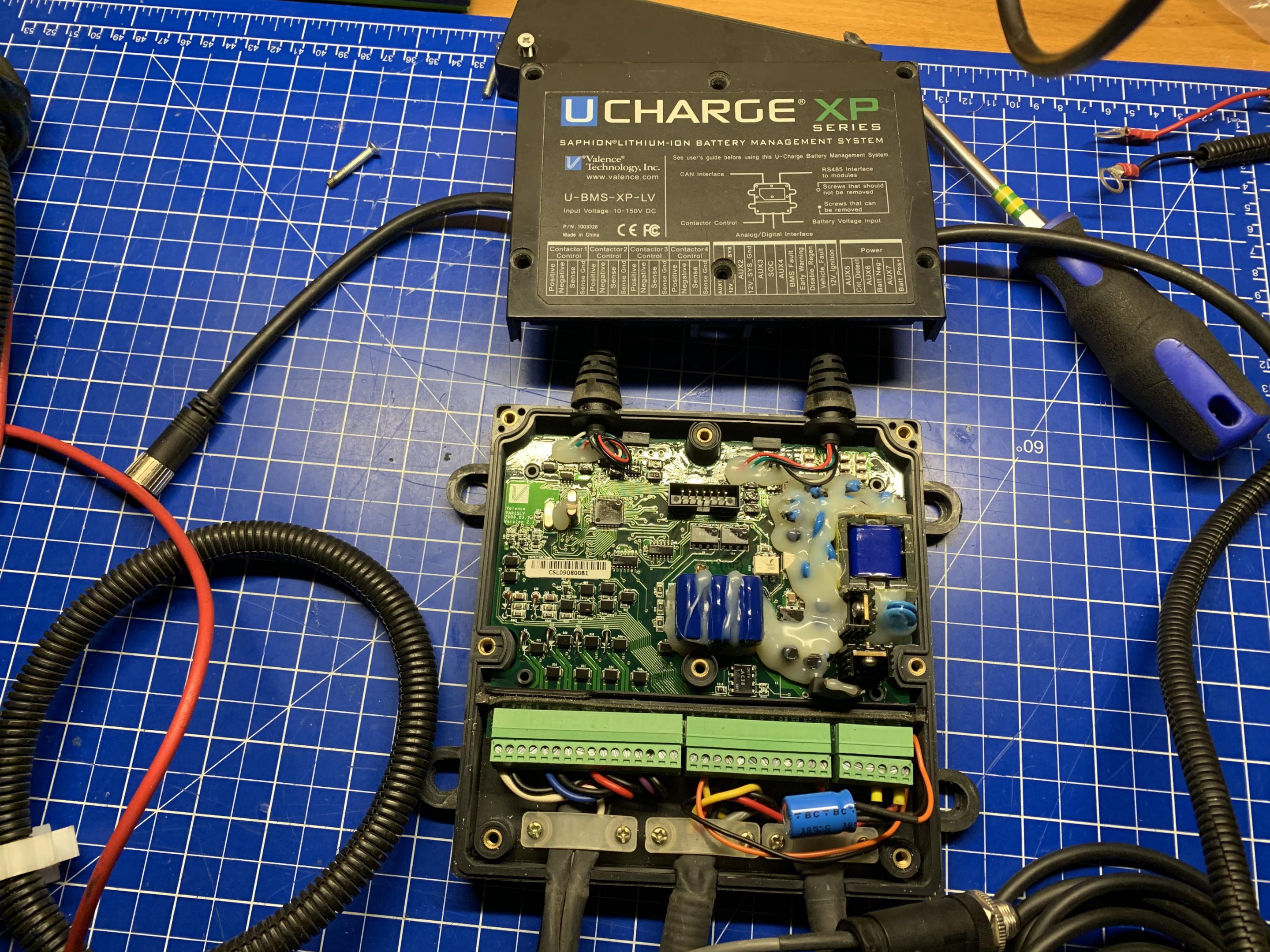
U-BMS Valence et U27-12XP, U27-36XP, UEV-18XP, U27-24XP
LCD Diag U-BMS Valence
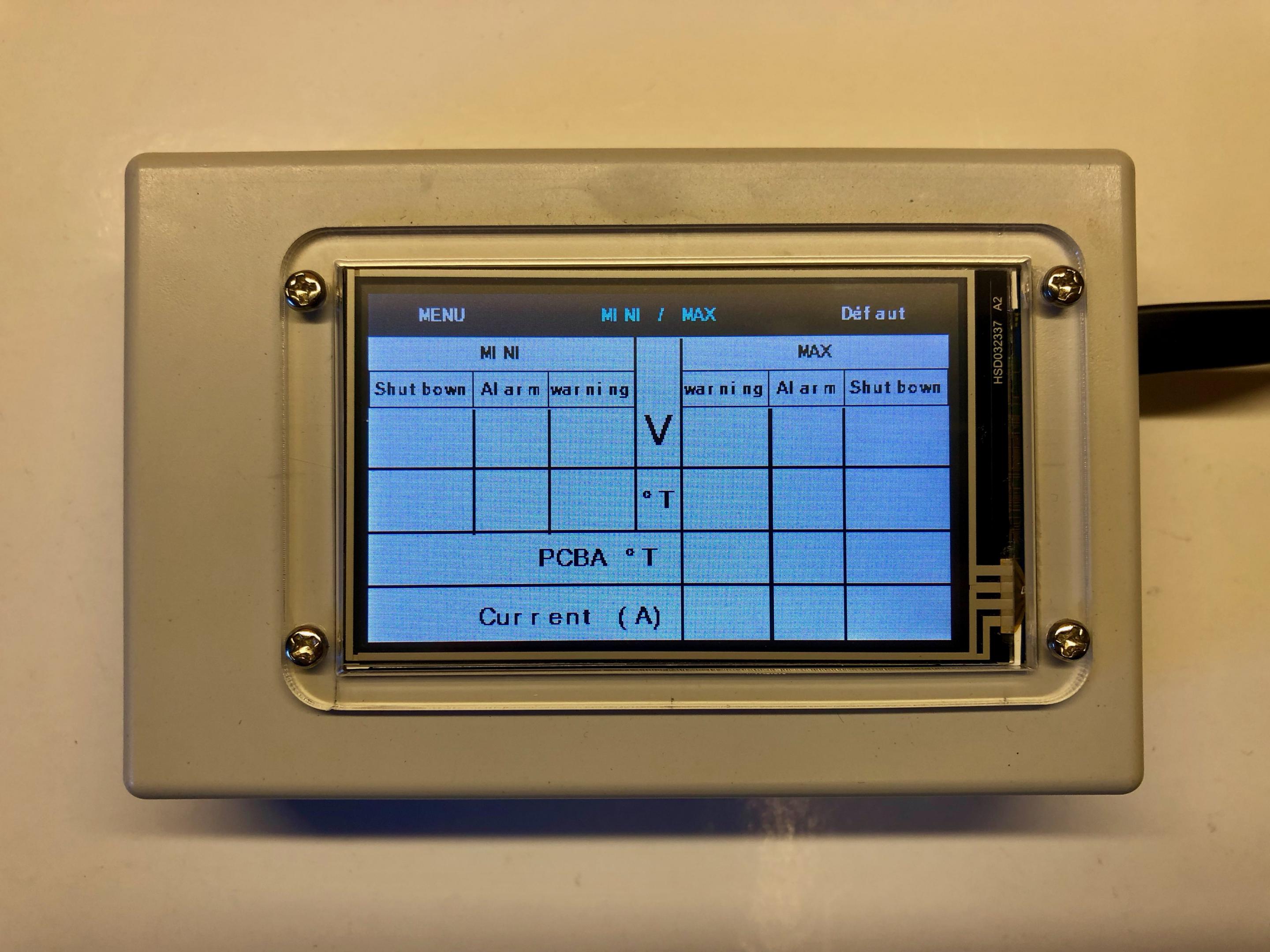
Le LCD Diag U-BMS Valence permet d'afficher les données transmises sur le réseau CAN du U-BMS. Ils affichent les informations essentielles comme le niveau de batterie, les tensions de cellules mini et maxi, la température, le courant, la tension du pack et les défauts.
Il est possible de changer la vitesse de transmission CAN pour s'adapter à celle du U-BMS.
Il y a également une fonction qui permet d'activer le mode charge ou le mode drive lorsque le BMS est configuré en mode activation CAN.
Il est compatible avec tous les véhicules et systèmes comprenant un U-BMS comme la Cour C-ZEN ou les trains électriques Soios ou les camions Maxity électriques.
Il peut communiquer et être alimenté directement à une prise BOD2 si celle-ci dispose du réseau CAN du U-BMS.





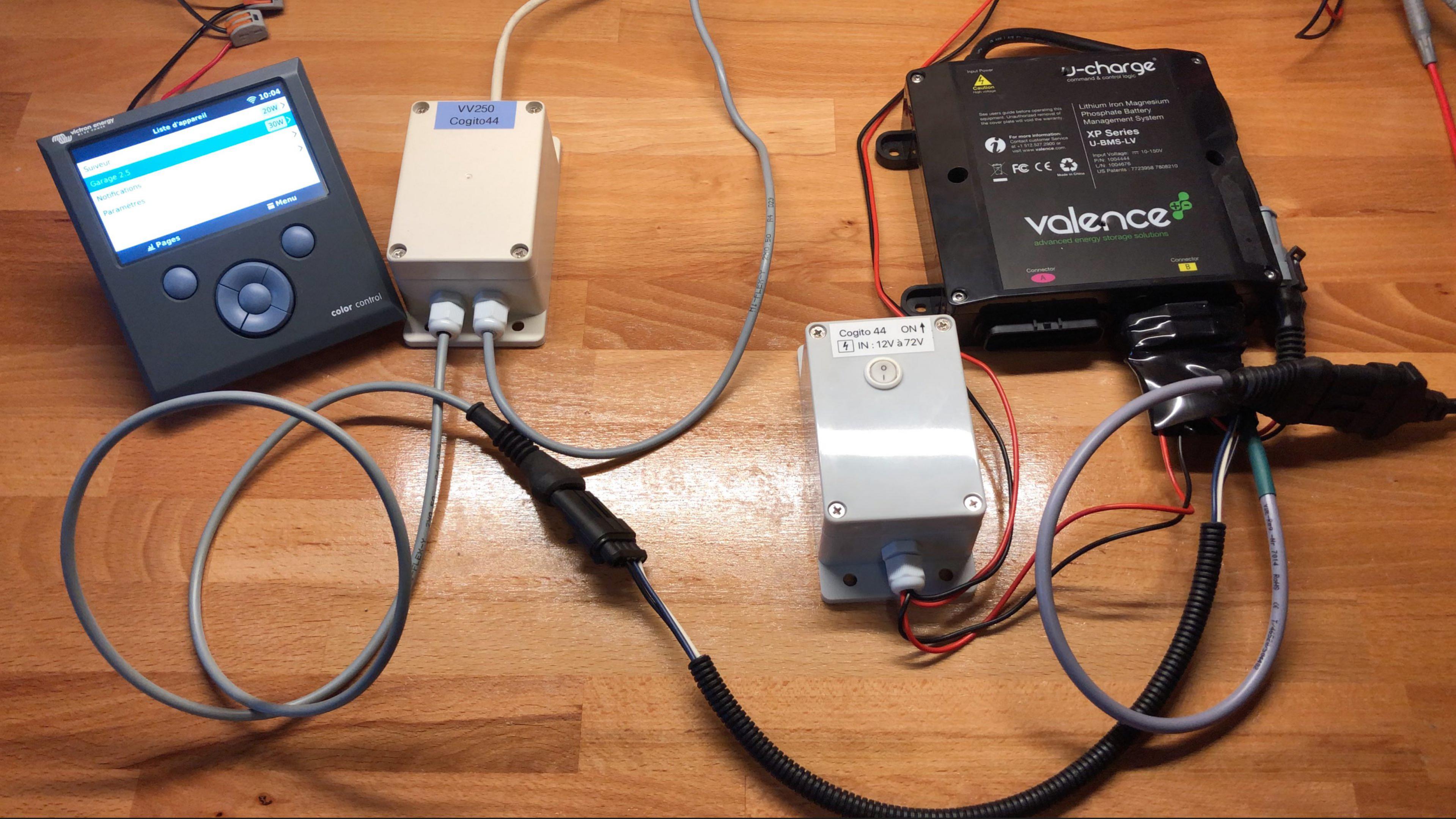
VV250 2.0 Valence U-BMS -> Victron
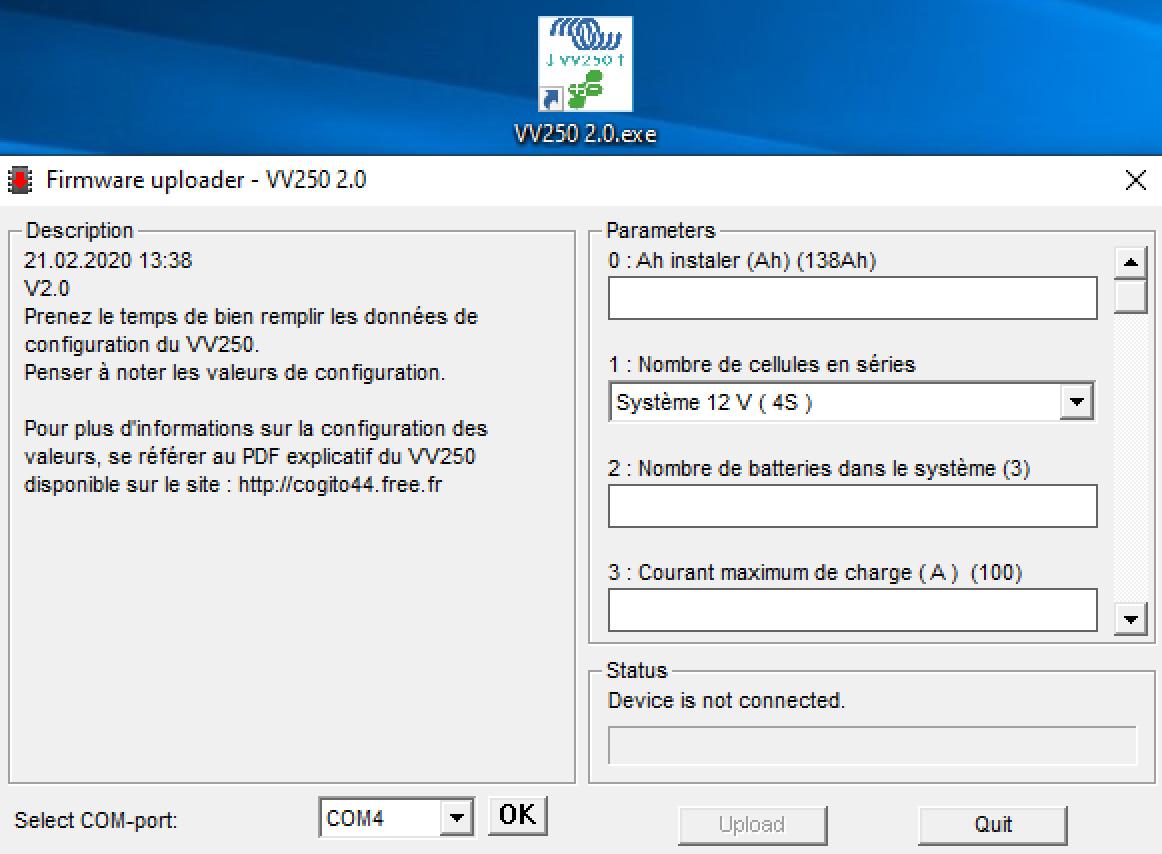
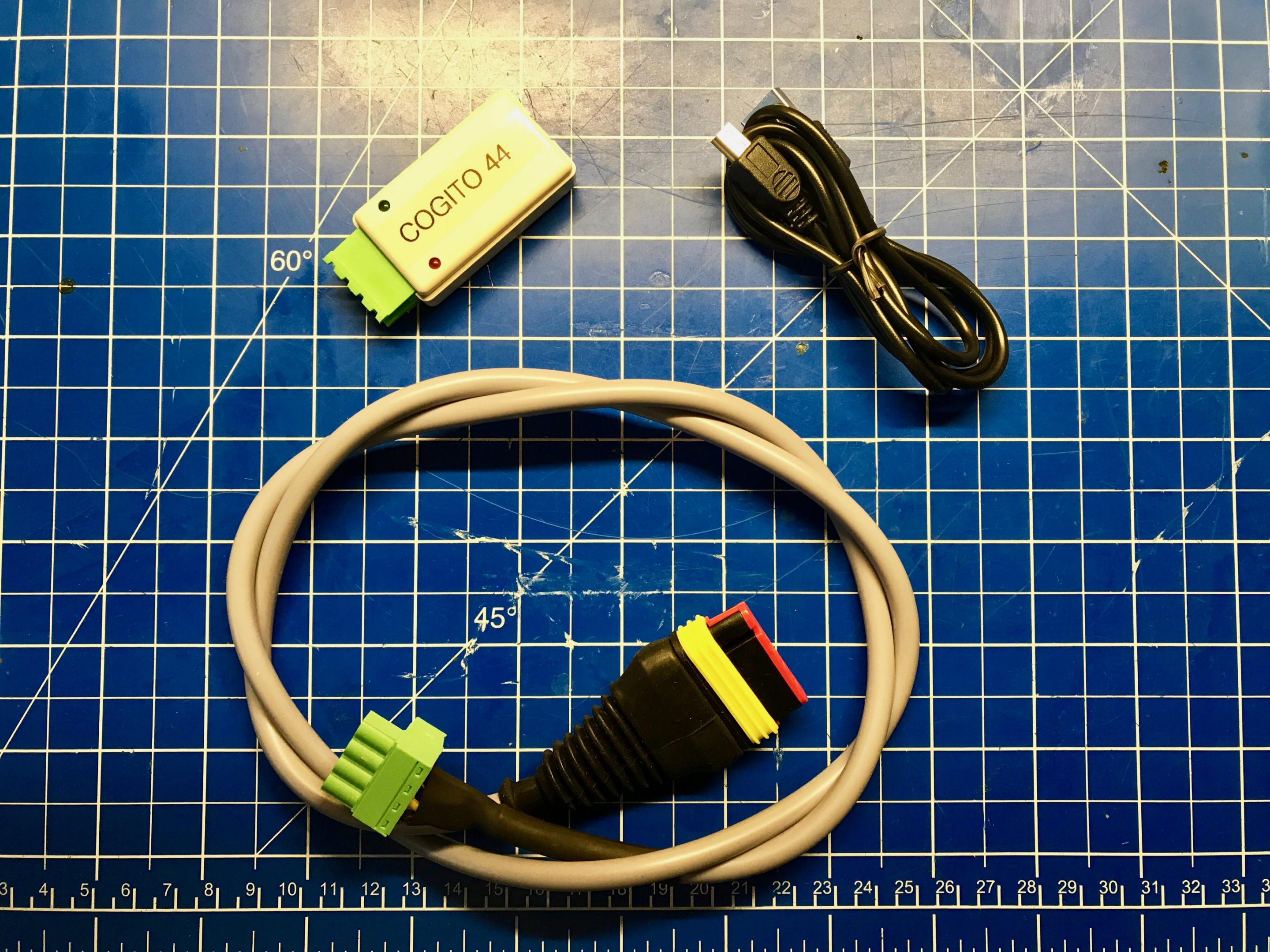
J’ai conçu l’adaptateur VV250 qui permet de faire communiquer un U-BMS Valence avec un CCGX, Venus GX, CANvu GX ou Cerbo GX de Victron.
Cet adaptateur interprète et modifie les informations circulant sur le réseau CAN, pour qu’il soit compréhensible par les systèmes Victron.
L’avantage d’utiliser les informations provenant des BMS de chaque batterie sont, une meilleure précision, une mesure individuelle de chaque cellule, plus de capteurs et des informations supplémentaires surtout au niveau des défauts.
Ce qui garantit une meilleure sécurité et durée de vie pour les batteries et pour les appareils qui sont branchés.
Le VV250 2.0 peux être reprogrammé directement avec un petit logiciel, vous pouvez voir les valeurs modifiables dans le PDF.
De plus il n’est plus obligatoire d’utiliser un BMV, car toutes les infos sont dans le BMS.









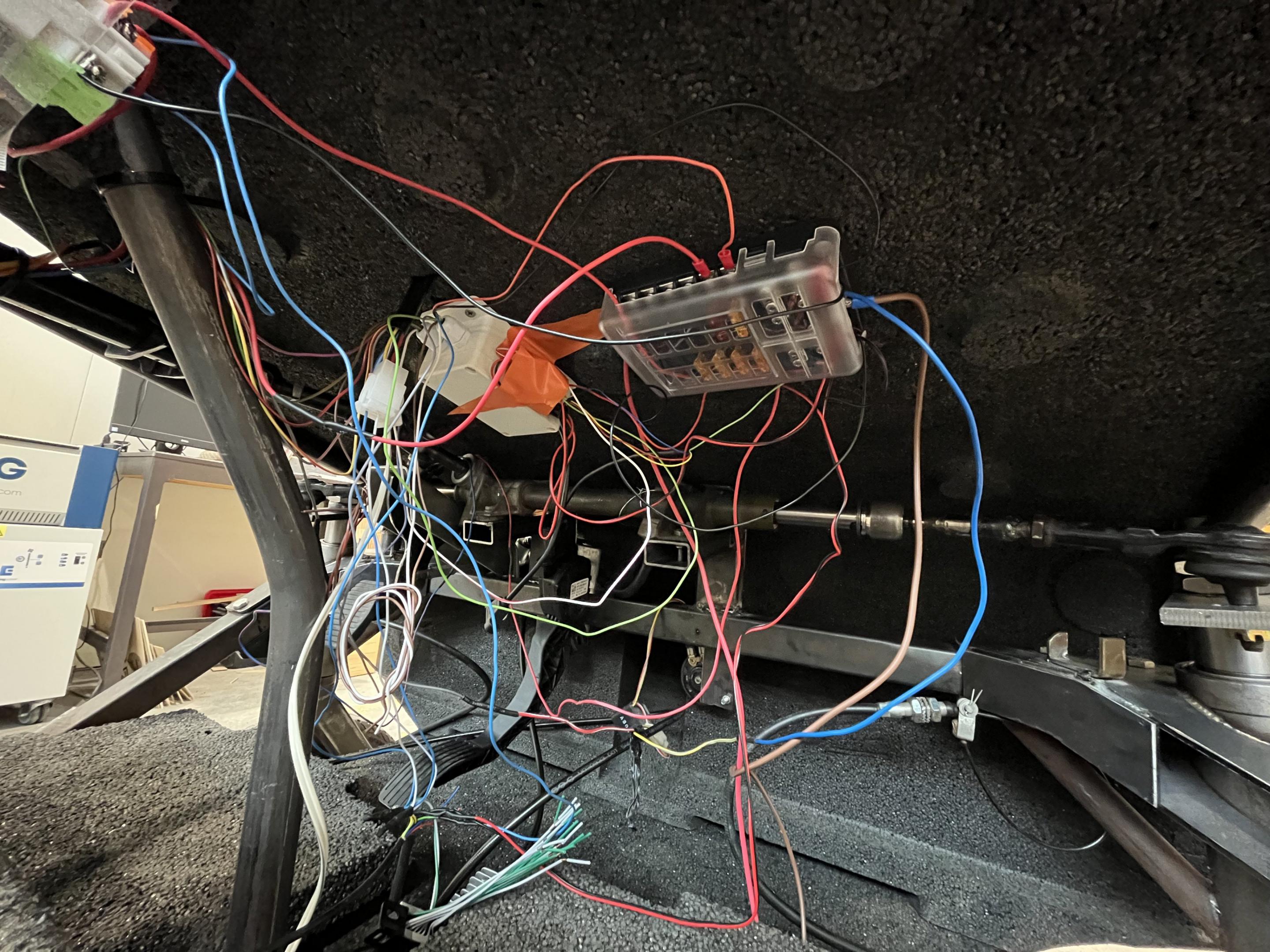
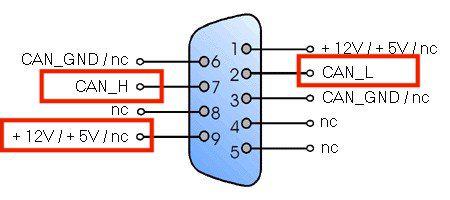
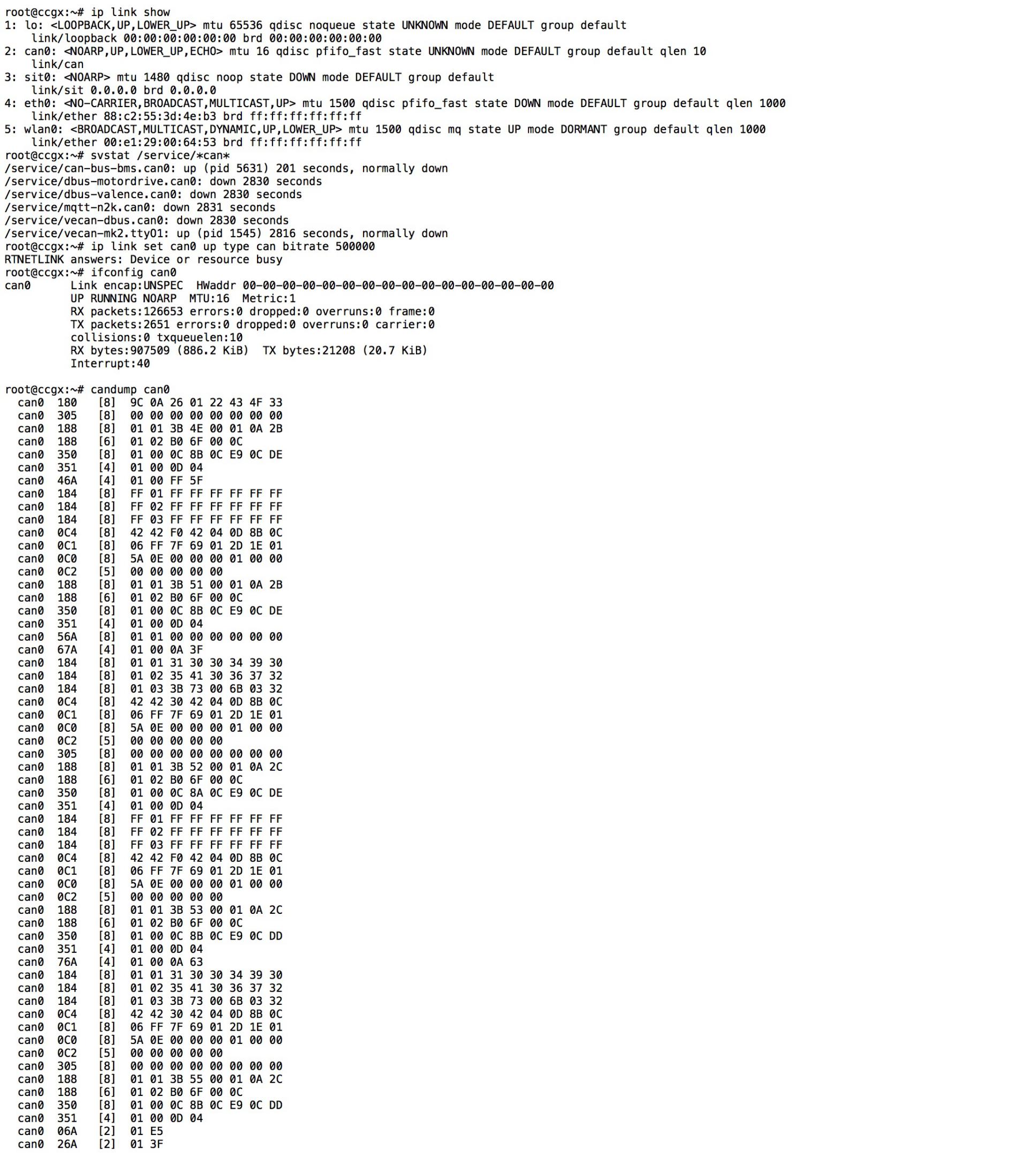
Rétro-Ingénierie
J’ai commencé par faire de la rétro-ingénierie sur des systèmes de protection pour batterie au lithium (BMS). J’ai étudié plusieurs protocoles de communication dont le RS 485 et le CAN bus, avec le peu de documentation que je disposer sur les batteries, j’ai réussi à comprendre le fonctionnement des systèmes et à l’utiliser pour mes propres systèmes.
Dans la continuité, j’ai réalisé la rétro-ingénierie d’une voiture électrique dans le but final a été de remplacer le BMS d’origine.
Tout cela m’a permis d’acquérir de nombreuses connaissances sur le protocole CAN, les calculs hexadécimal, décimal, binaire et la programmation automates CAN.
Tout ceci dans le cadre familial, certaines infos sont confidentielles, je ne peux pas en dire plus.


Banc de test pour moteur d'aiguillage
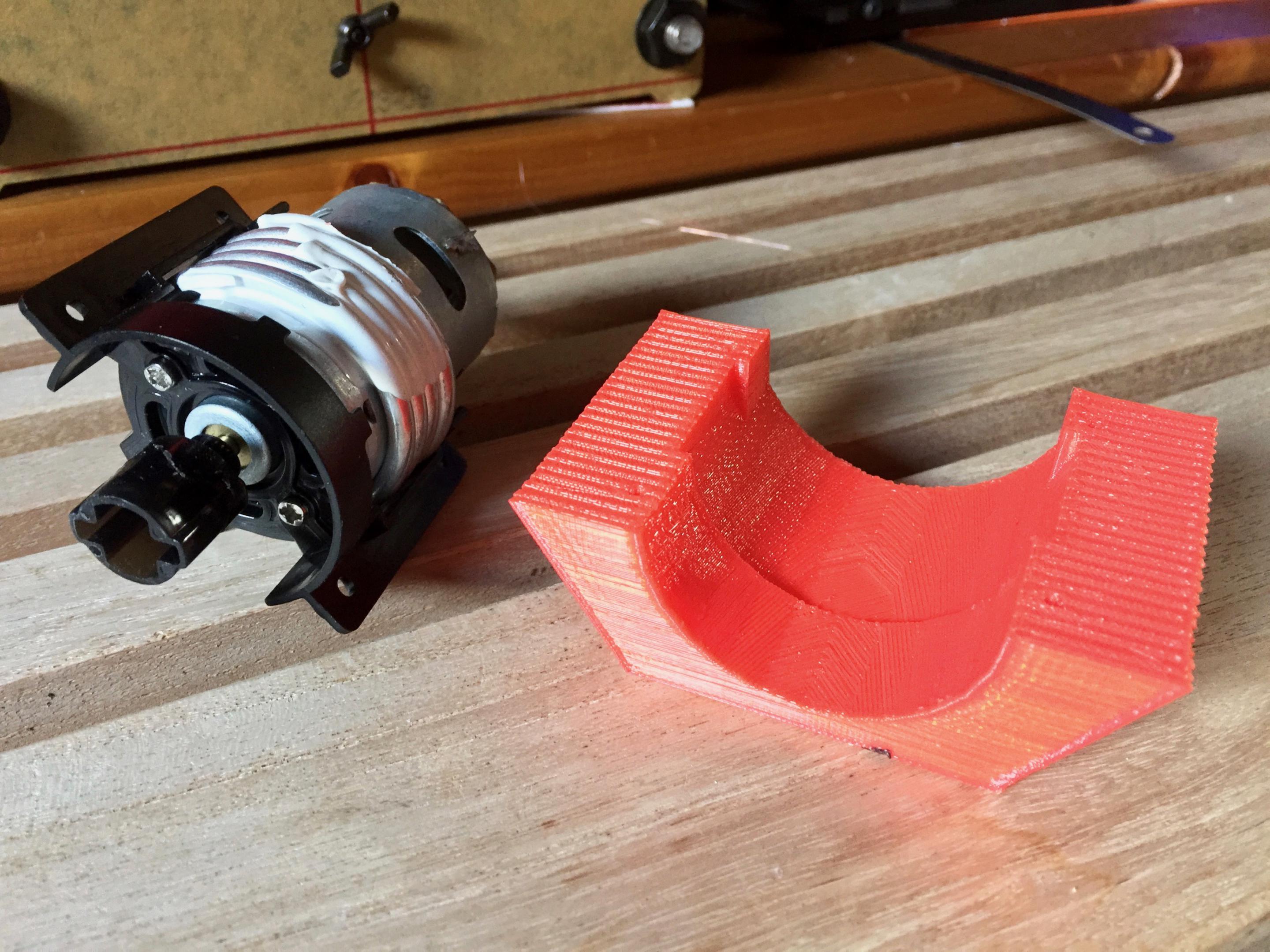
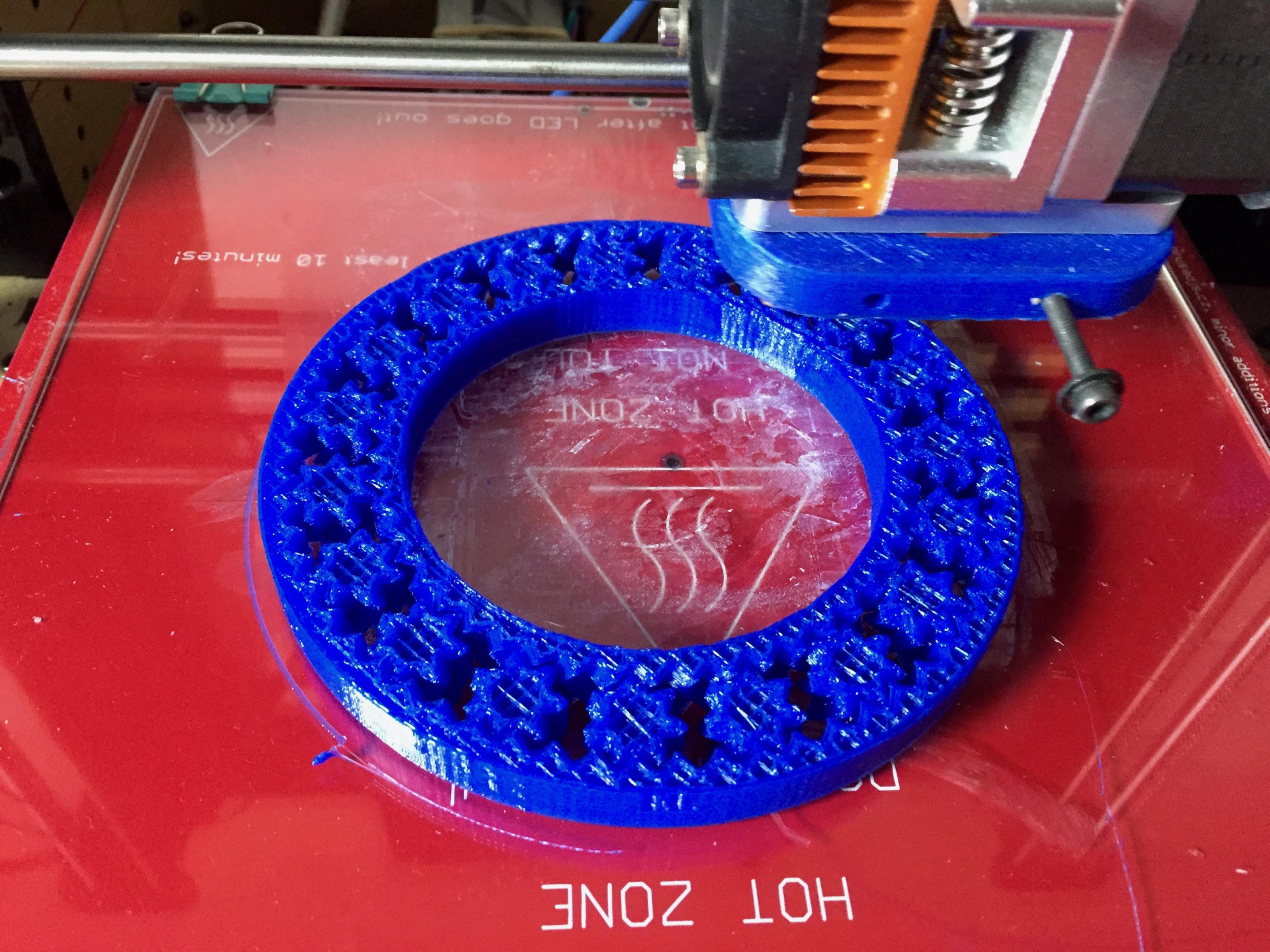
Imprimante 3D
Mon imprimante 3D est une Geeetech Prusa i3 Pro B, elle permet d'imprimer les pièces d'une dimension maximum de 20 par 20 sur 18 cm de hauteur, elle est équipée d'un extrudeur qui peut imprimer avec du filament de 1,75 mm du PLA, de l’ABS, du nylon ou du bois composite. Elle permet également d'imprimer avec du figement spécial comme du filament transparent, souple, conducteur de courant, etc.










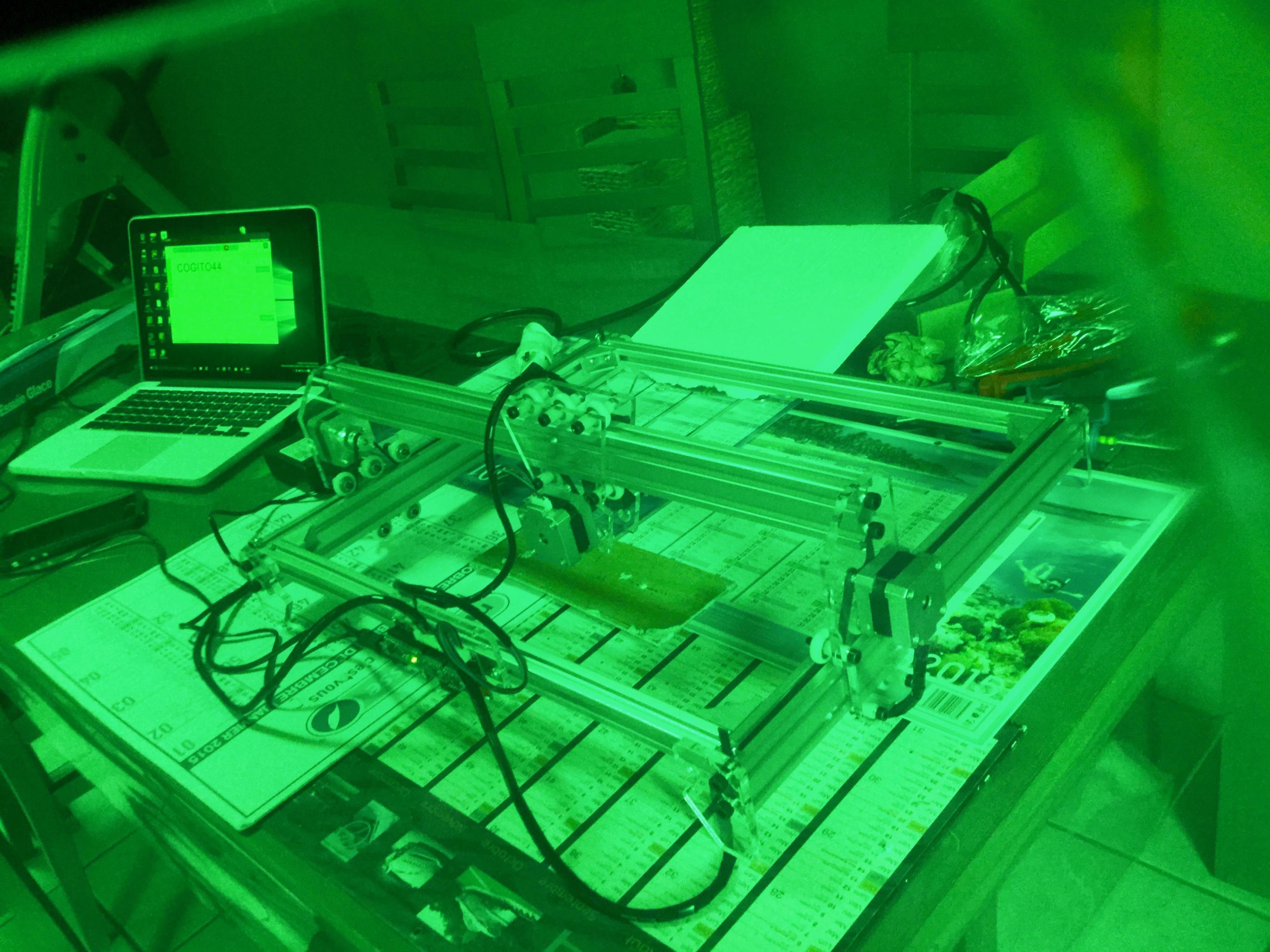
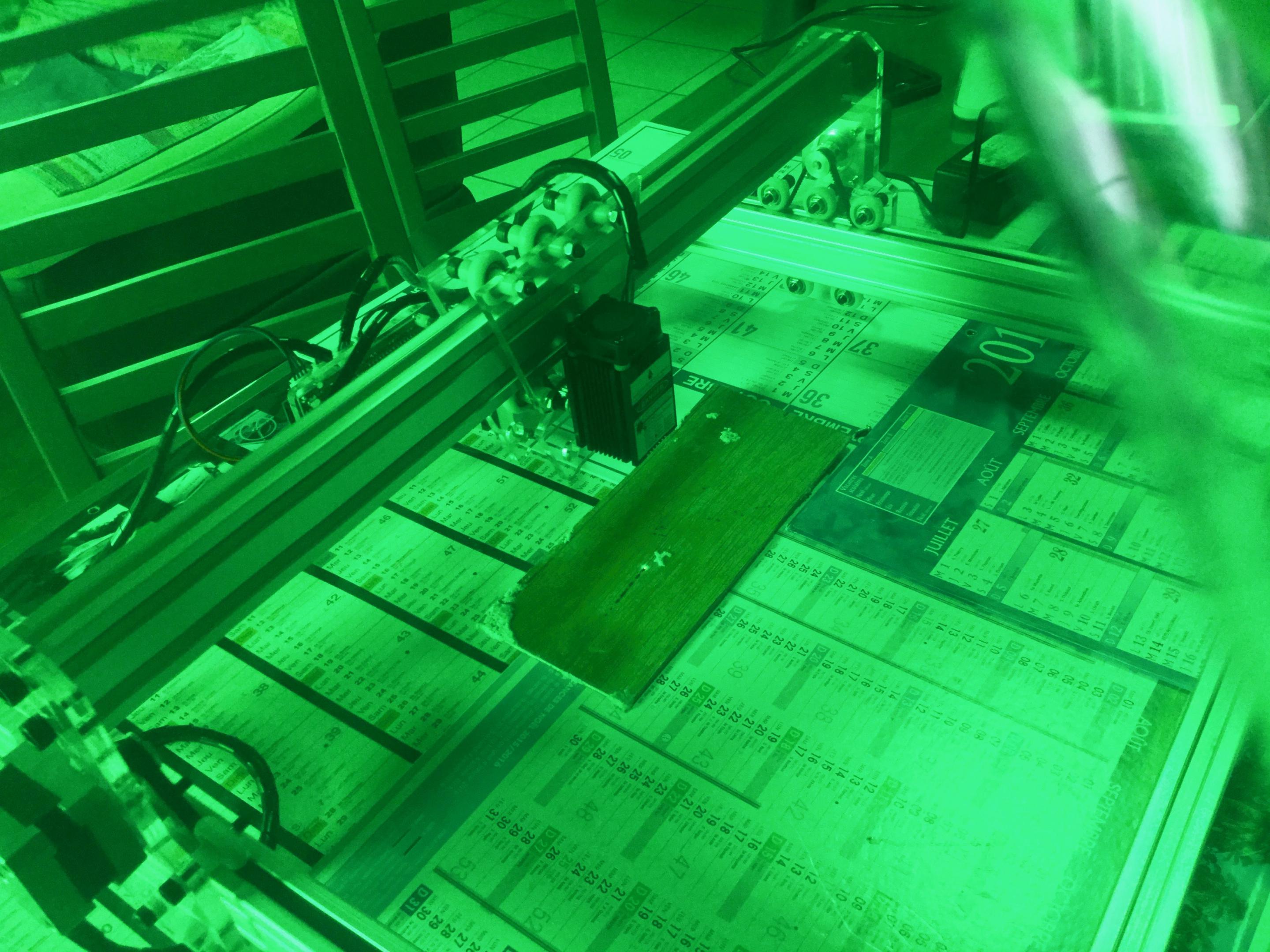
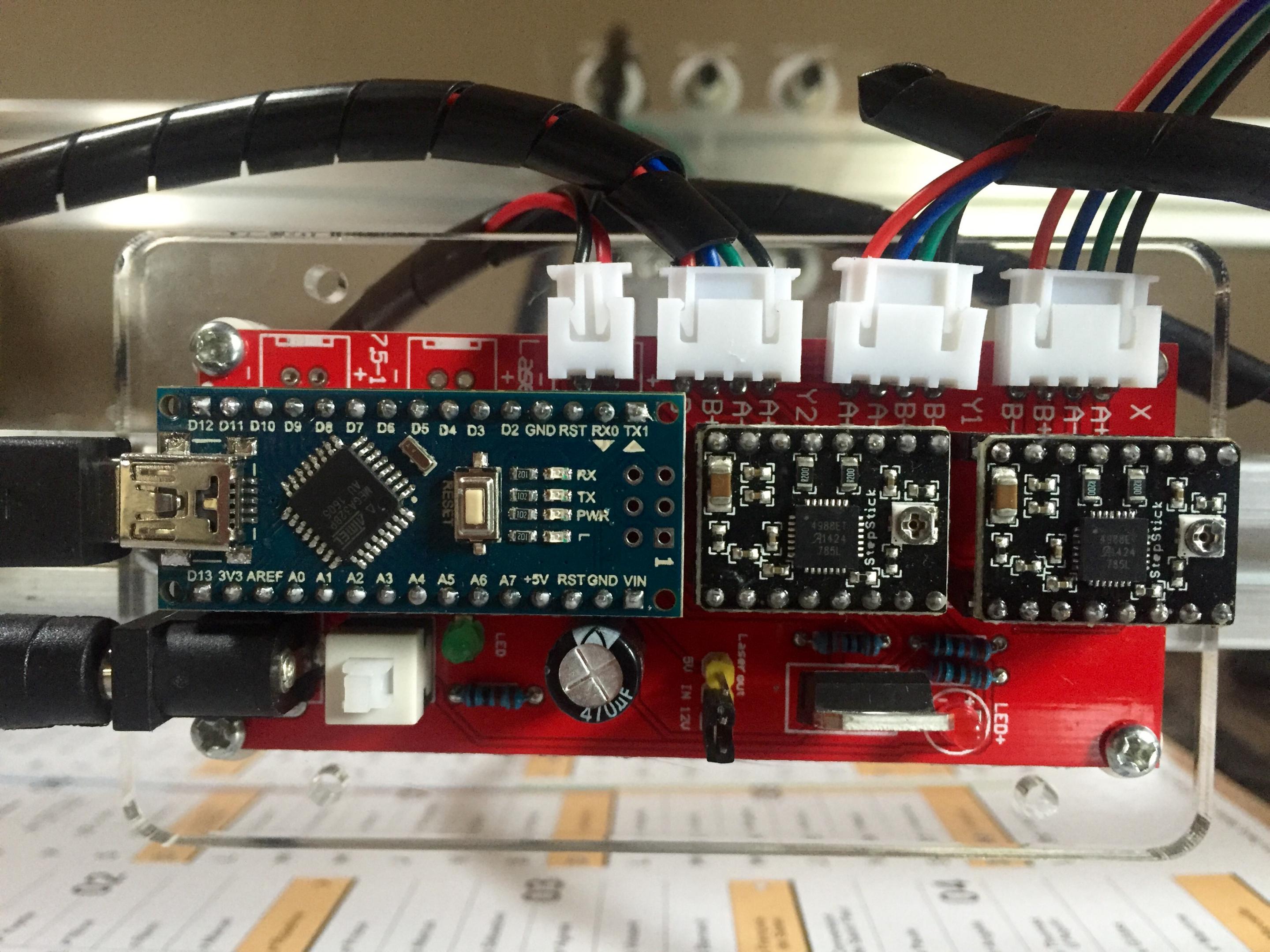
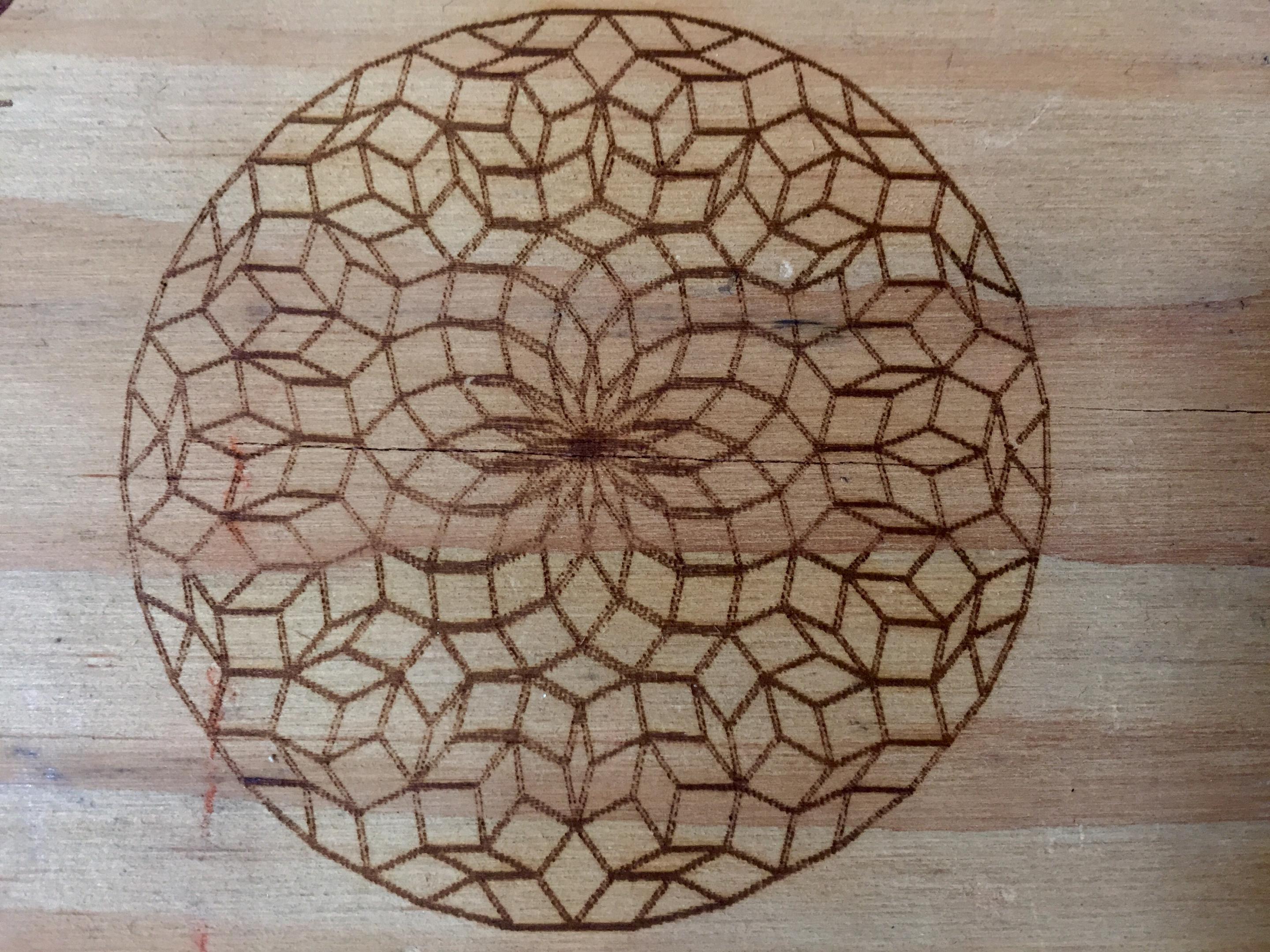
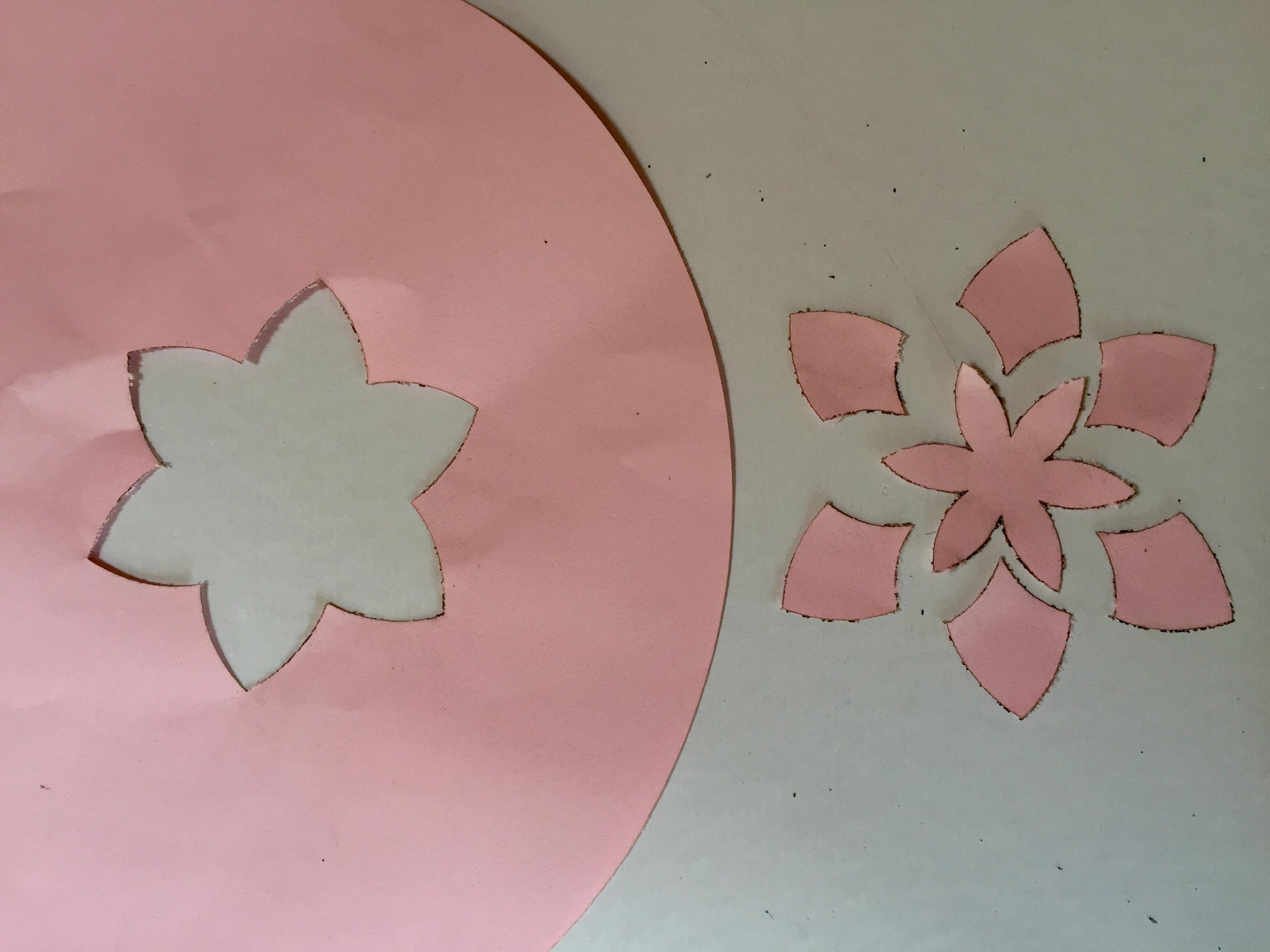
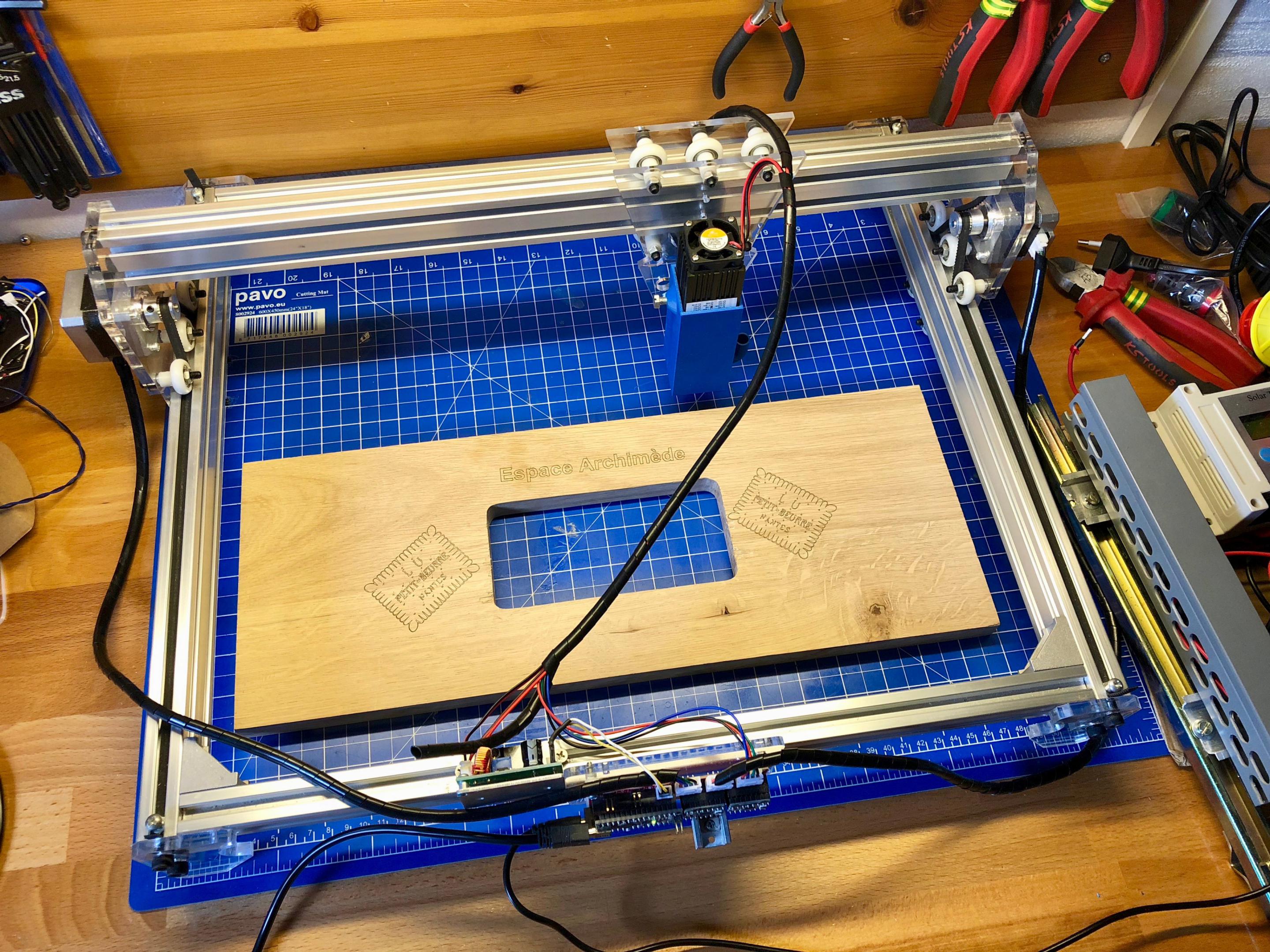
CNC laser
Cette CNC laser est contrôlé par un Arduino Nano, elle peut graver sur du bois ou découper du papier grâce à son laser de 3000 mW. Elle peut travailler sur 40 cm sur 35 cm.




Scanner 3D Ciclop
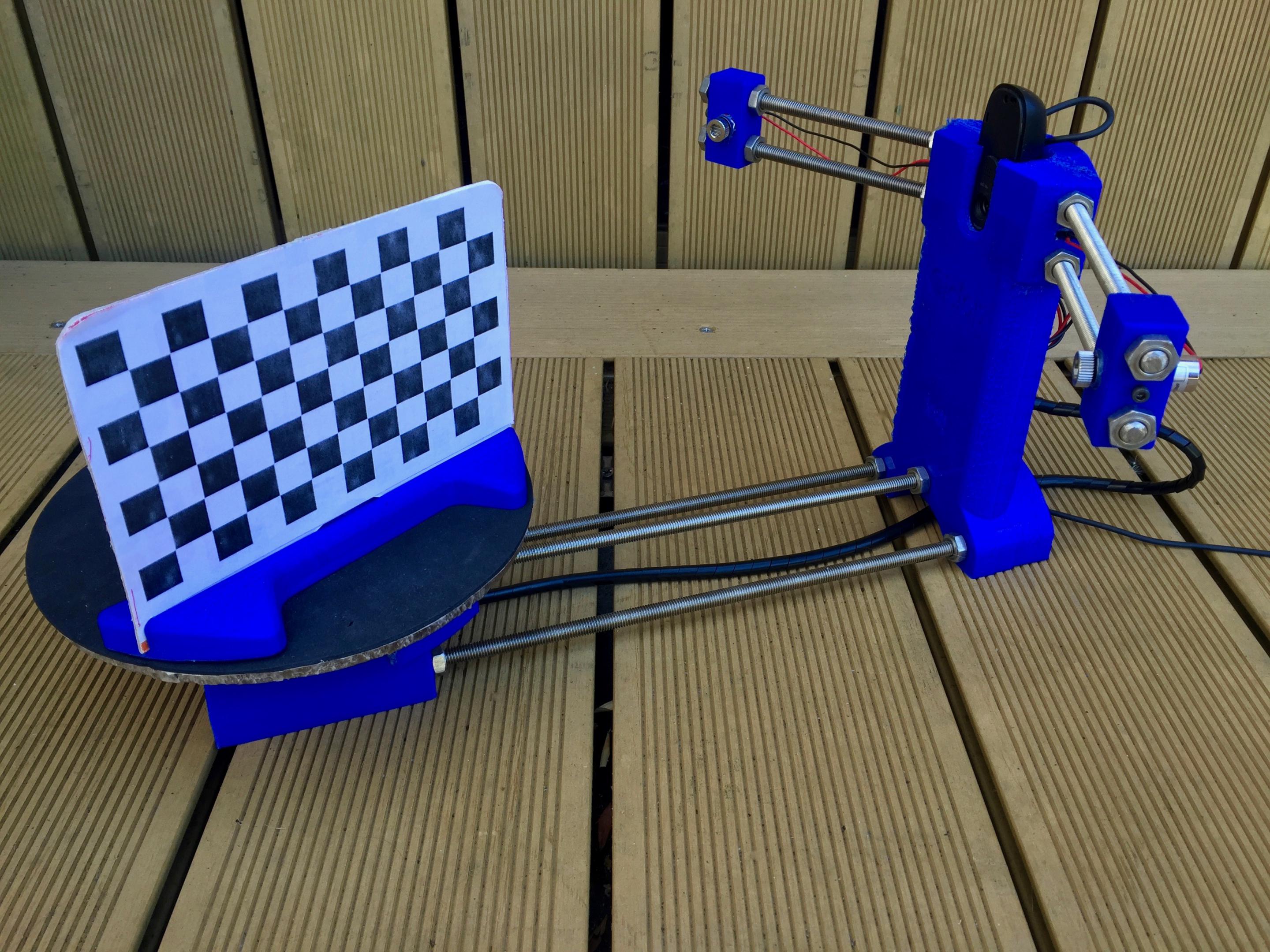
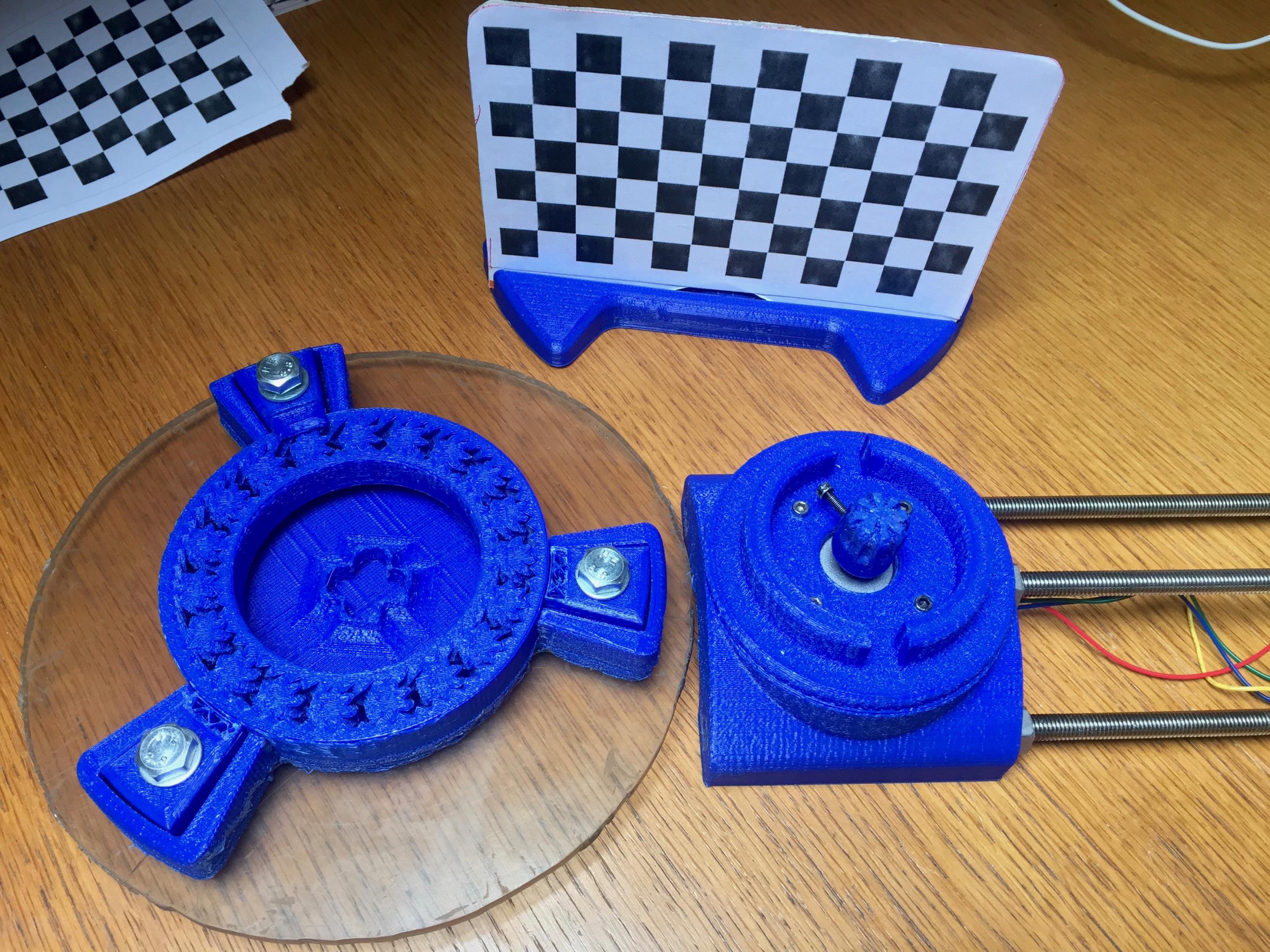



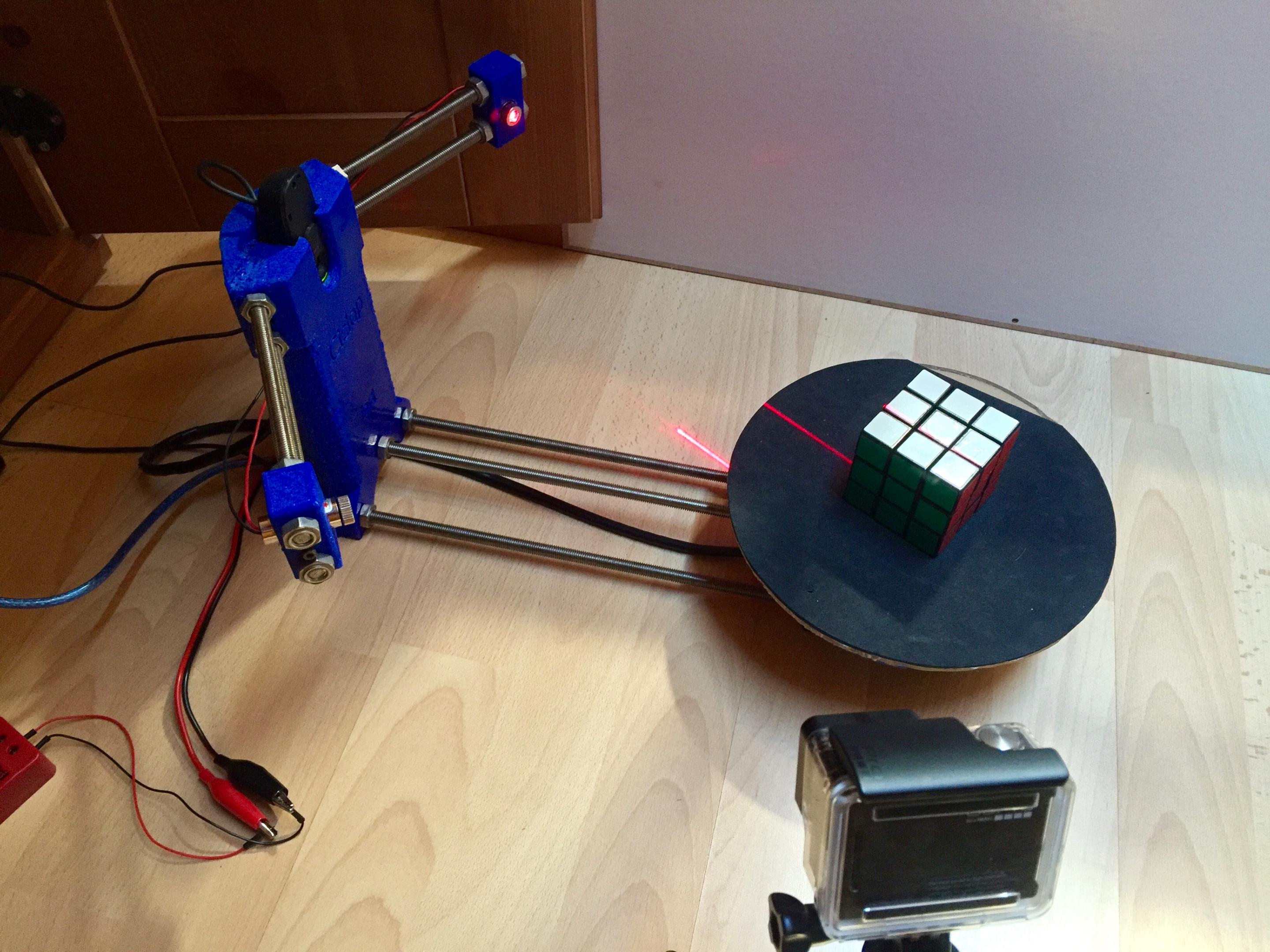
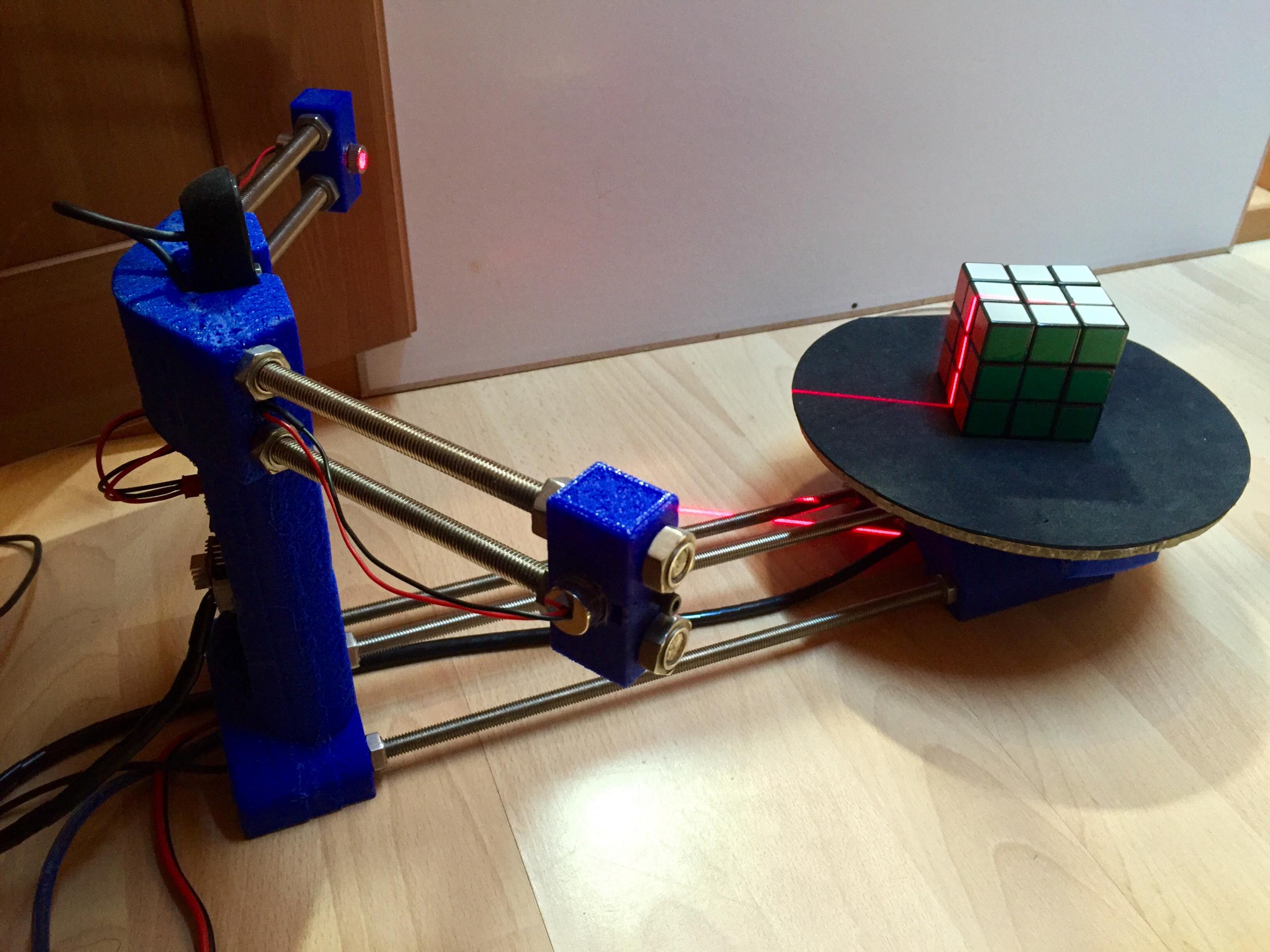
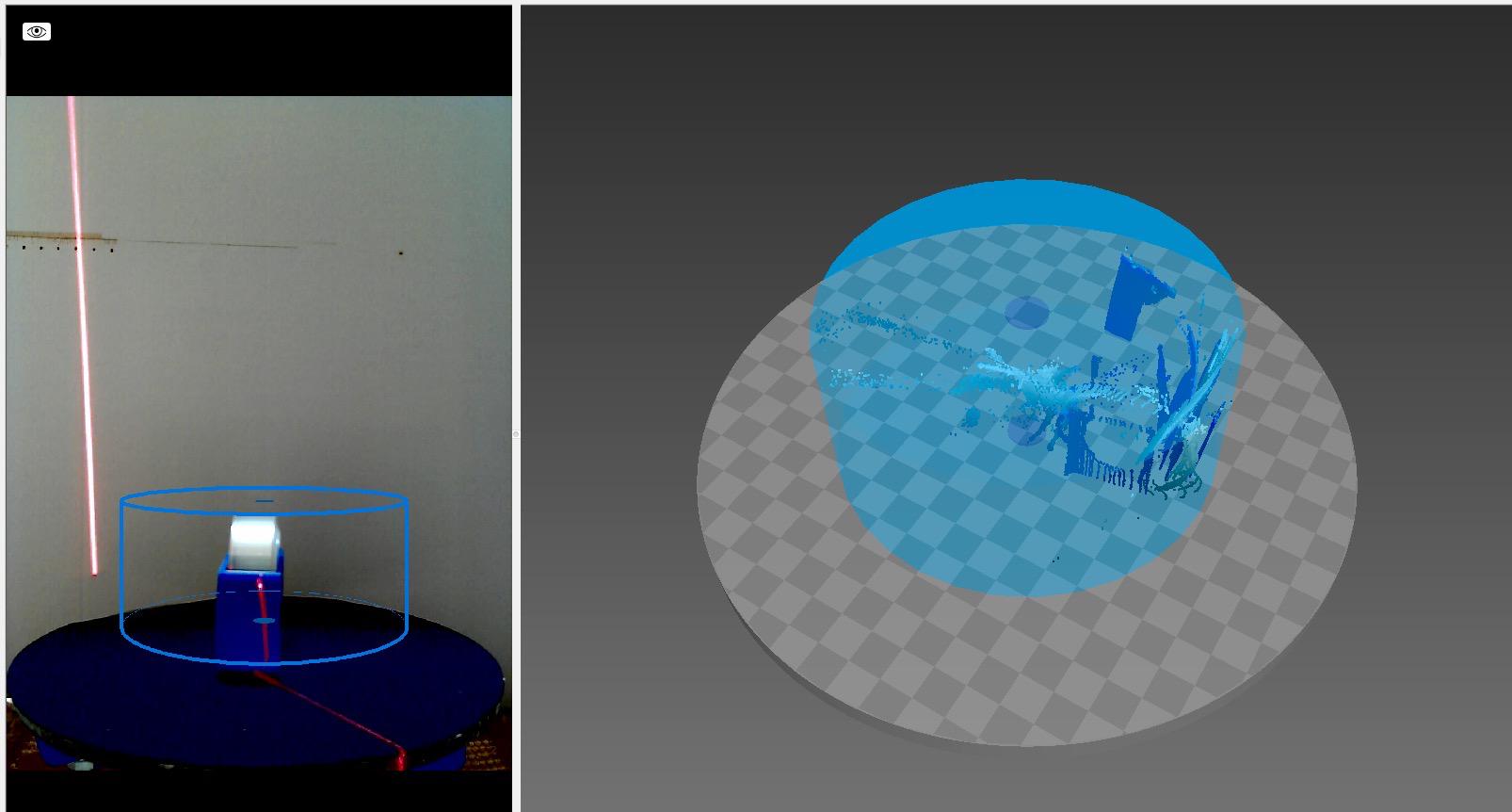
Ce scanner 3D est totalement open source, il est possible de récupérer les plans et les logiciels sur Internet, il est constitué d’une plate-forme rotative motorisée par un moteur pas à pas, d’une carte Arduino, d’une webcam et de deux lasers linéaires.
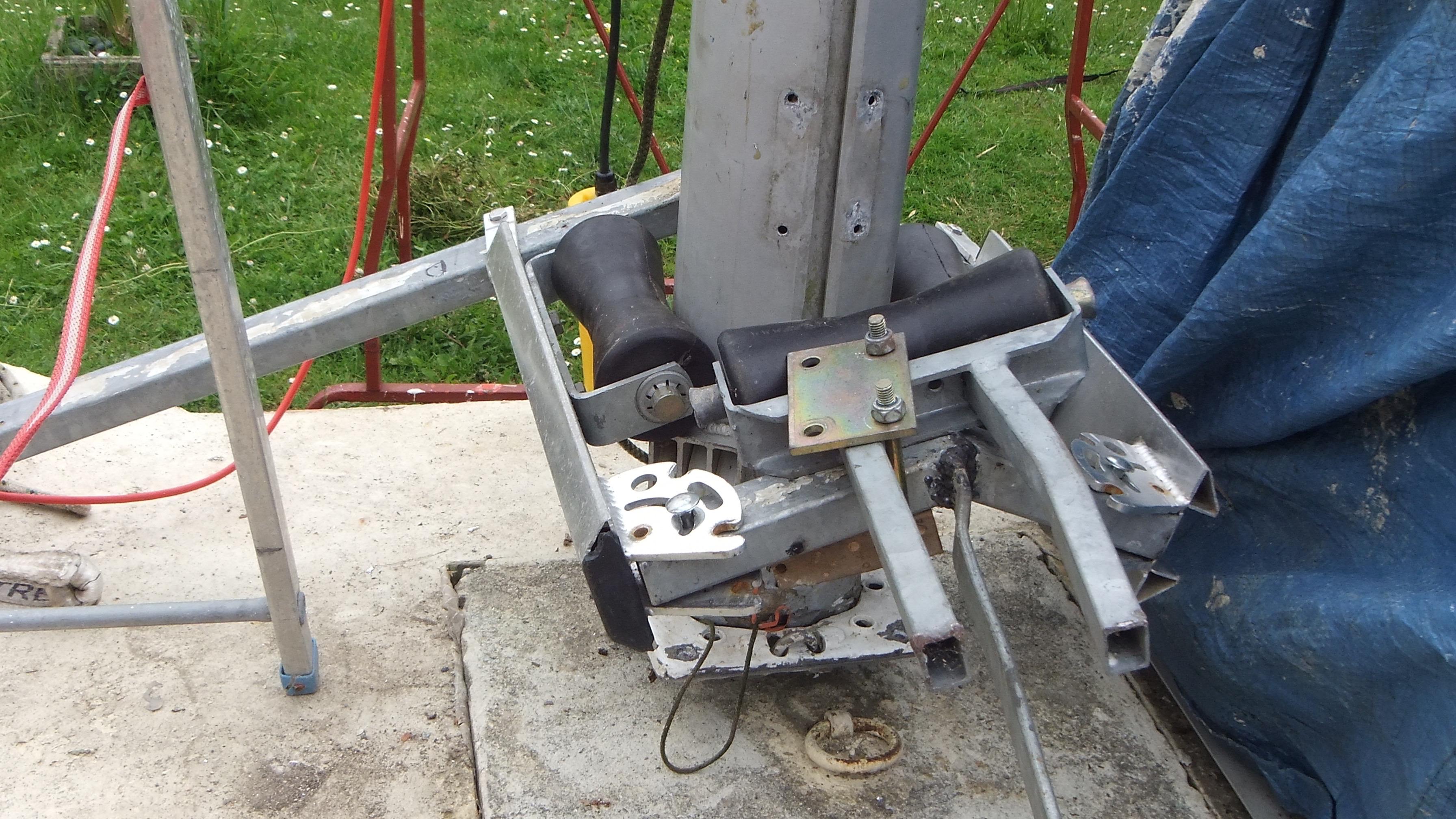
Éolienne à hauteur variable
















.jpg)
.jpg)
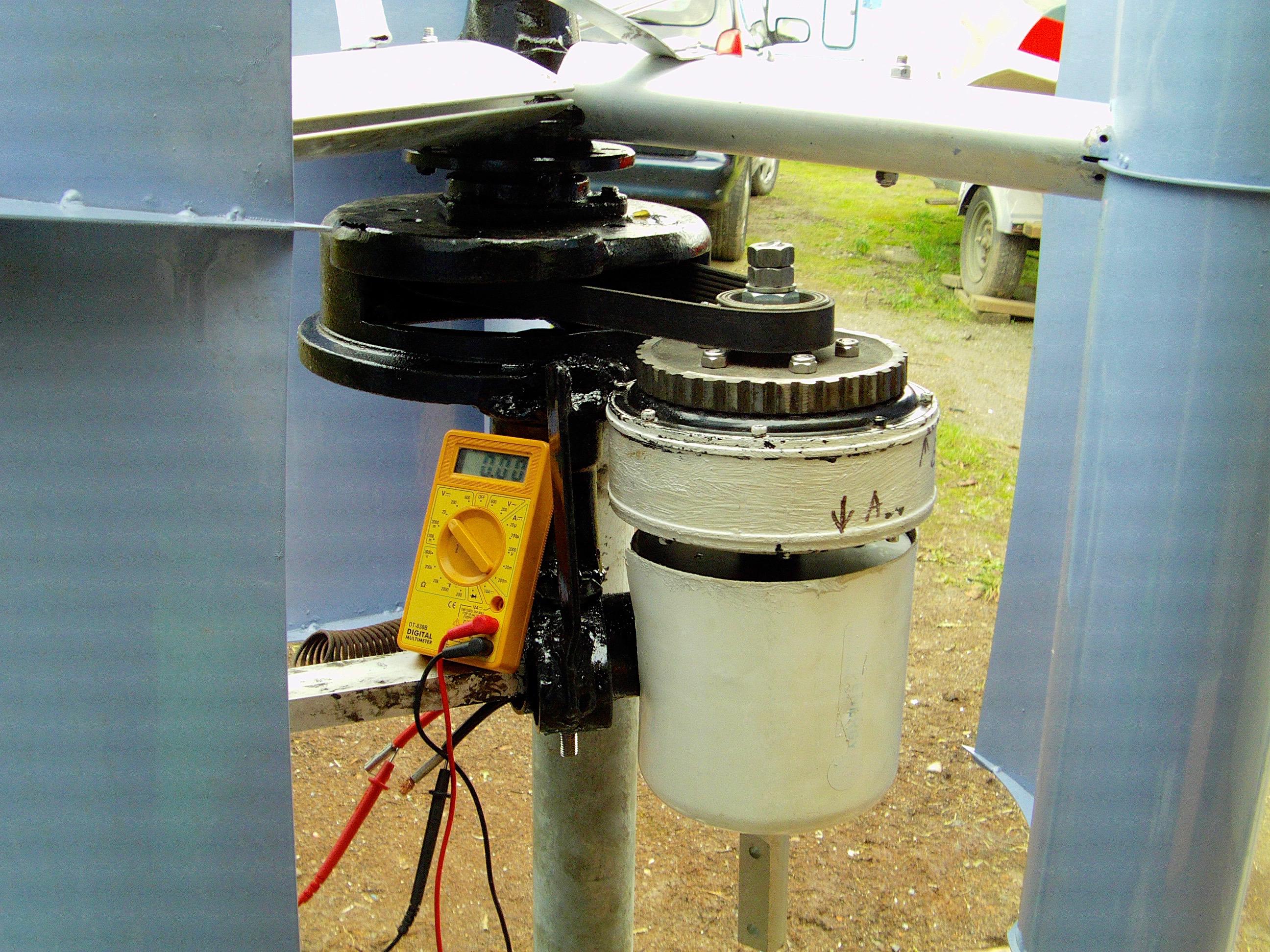




Nous avons réalisé un système d’éolienne à hauteur variable, avec un mal de bateau de 9 m qui descend dans un puits à l'aide d'un treuil électrique. Nous avons mis en premier lieu une éolienne à axe horizontale d’une puissance de 1 kW puis une éolienne à axe vertical qui a un bien meilleur rendement dans notre situation.
Découvrez, mais ancienne réalisation en cliquant ci-dessous.
Site créé le 01/02/2008 - Alexis BAZIN
Copyright Ⓒ 2008 - 2025 Tous droits réservés
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)






.jpg?v=1i2frfb)